整流器空间矢量调制算法的比较研究
在DSP中的实现方法
由式(5)可以计算出一个PWM周期桥臂中点的电压矢量URf,从其在d、q轴投影得到其 d、q轴的分量分别为Ud、Uq,那么CPU下一步就要由Ud、Uq的值计算出三个桥臂每个开关 管的占空比,从而给各个桥臂正确的触发脉冲。用什么样的算法来得到每个开关管的占 空比就是本节要讨论的问题。
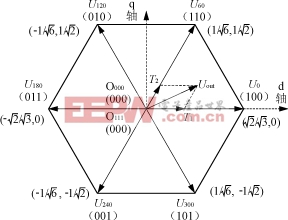
SVPWM调制方法就是从8种基本空间矢量中选取合适的空间矢量,让它们在一个PWM周期内占一定比例的时间,从而可以近似URf作用整个PWM周期的效果。图2画出了8个基本矢量,其中6个有效矢量把整个平面分为6个扇区,为了使整流器有最低的开关频率,在选取有效矢量的时候要选取离URf最靠近的两个基本矢量。例如如果URf在第一扇区,那么有效矢量要选择U0(100)、U60(110)。为了让在一个PWM控制周期中这两个基本电压矢量的组合作用效果能等效于URf,那么它们要满足下式URf=(T1Ux+T2Ux+60)(6)
式中:T为一个PWM控制周期,T1,T2分别为Ux,Ux+60的作用时间。
一般一个PWM控制周期比较短,URf在T时间内的积分可以用URf乘以T来代替。故式(6)可以化简为URf=(T1Ux+T2Ux+60)(7)
用行列式的表示方法可以表示为URf=[UxUx+60][T1T2]τ(8)
等式两边都同乘[UxUx+60]-1后得到式(9)。
[T1T2]τ=[UxUx+60]-1URf(9)
式中:[UxUxx+60]-1是对应扇区的归一化分解矩阵,以第一扇区为例:[U0U60]=( 10)[U0U60]-1=(11)
这样在DSP中,先进行判断URf的扇区,计算的流程图如图3所示。
然后根据不同的扇区的值来选取不同的归一化矩
整流器空间矢量调制算法的比较研究
阵,再由式(9)可以算出T1,T2的值。具体实现方法如下。先定义一个三维常量数组 decomp[6][2][2]来存放着六个扇区的归一化分解矩阵,每一个扇区的归一化矩阵在数组的存放格式如式(12),
[UxUx+60]-1=(12)
那么
T1=Ud×decomp[扇区][0][0]+
Uq×decomp[扇区][0][1](13)
T2=Ud×decomp[扇区][1][0]+
Uq×decomp[扇区][1][1](14)
得到T1,T2的值,也就是两个有效基本矢量在一个PWM控制周期内各作用的时间,那么零矢量作用的时间为T0=T-T1-T2,因为零矢量可以为0000也可以是0111,先假设它们在一个PWM控制周期内作用的时间各为T0/2。
以第一扇区为例,Ux=(100),Ux+60=(110)各作用的时间为T1,T2,那么可以得到在一个PWM控制周期内,A、B、C三相上管开通的时间分别为
——A相T1+T2+T0/2
——B相T2+T0/2
——C相T0/2
当URf在其他的扇区时也有相似的算法。上面的算法没有考虑根据式(12)、(13)计算T1、T2之和大于T的情况,但在实际的控制过程中,系统在启动的时候,直流侧电压比较低,或是交流侧实际电流和指令电流的差值比较大时,URf会超出图2中六个基本有效矢量终点围成的正六边形,这时根据式(12)、(13)计算出T1、T2的值会使得T1+T2≥ T,也就是对应SPWM算法中的过调制。虽然CPU设计厂商在设计CPU的时候考虑到了这种情况,即使T1+T2≥T时也不会导致产生SVPWM波的硬件产生错误的导通信号。如果把这样计算出的T1、T2值直接应用于产生SVPWM波的硬件中,会使得后作用的那个空间矢量损失掉〔(T1+T2)-T〕的时间。折中的办法是让每个空间矢量都少作用〔(T1+T2)-T〕的时间,这样Ux作用的时间为T1-〔(T1+T2)-T〕,Ux+60作用的时间为T2-〔(T1+ T2)-T〕。这样可以使得SVPWM调制出现饱和时,也能使波形有较好的对称性。
4几种SVPWM波的比较
用上面的方法,我们可以由桥臂中点的空间电压矢量,计算出一个PWM控制周期两个有效基本空间矢量作用的时间,但并没有仔细考虑零矢量的选择和每个矢量作用的顺序。如果选择不同的零矢量,而且使有效矢量作用的顺序也有不同,就会产生出不同的PWM。虽然从平均值看来,它们在一个PWM控制周期的作用效果和URf一样,但它们的谐波特性以及开关的次数都有不同。因为像专为电机控制而设计的微处理器,如TMS320F240、ADMC331和 Intel的8XC196MC系列,都内置产生PWM波的硬件,所以利用这些硬件能很方便地产生出三种PWM波,下面就这三种PWM波[3]进行讨论。
第一种是在一个PWM控制周期的开始先作用T0/2的零矢量0000,然后是T1的Ux,再是T2的 Ux+60,最后是T0/2的零矢量0000。这种PWM波的谐波含量比其它几种而言要大,但它在一个PWM控制周期内一共只有4次开关切换。如图4所示。
第二种是在一个PWM控制周期的开始先作用T0/2的零矢量,然后是T1/2的Ux,再是T2的 Ux+60,再是T1/2的Ux,最后是T0/2的零矢量,这儿零
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 适合高效能模拟应用的线性电压稳压器(07-19)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)
- 弥补模拟控制器缺点的数字控制器(08-04)
- 欠压/过压锁定(08-25)
- 多重转换:冗余电源系统电流限制的一种新方法(12-24)