最新全能数控电源IC-ADP1043A(二)
摘要:随着数字技术的发展和成熟,电源产品更多地向数字化方向发展。采用数字技术可减小电源高频谐波干扰和非线性失真,同时便于CPU数字化控制。文中重点介绍了ADP1043A的功能、原理及具体应用细节。ADP1043A的创新架构能支持多种拓扑结构,其图形化的操作界面、丰富的监控和管理功能,非常方便技术人员操作,也改变了以往对数字电源的认识。
关键词:ADP1043A;EEPROM;OrFET控制;同步整流
(上接第5期)
2.3 CS2的工作
CS2用于监视和保护二次侧的电流。CS2的ADC的整个范围是225mV,通常满载时电压可以降到37.5mV、75mV或者150mV。不同的输入,通过一对电阻,送到ADC,当使用低边电流检测时需要一个10k电阻。当使用高边检测时需要110kΩ电阻(12V输出)。
推荐使用低边电流检测,它比高边能更好地改善性能,而且高边电流检测不支持用于20V以上的输出电压。
CS2的典型电路如图4、5所示,通过对CS2的设置可改变阈值和限流点,这些阈值及限流点也在限流寄存器部分加以描述。

不用CS2时,两个CS2输入需通过10kΩ电阻接到功率地。
2.4 电压检测及控制环
ACP1043A上复杂的电压检测输入用于监视控制和保护电源的输出,电压信息可以通过I2C接口,所有电压检测点都可以用数字化校准,以消除由外部元件引起的任何误差。通过校准可以在任何产品环绕下执行,其设置储存在E2PROM中。
从控制环的观点,用ADC的修正速率可以设置开关频率,因此,如果开关频率设置成100kHz。则ADC的输出信号为每100kHz送到控制环,因为调制,ADC取样也在1.6MHz。ADC的输出是在16MHz时段期间,16次读出的平均值。
对电压监视,VS1、VS2和VS3上的电压值寄存器为每10ms修正一次。ADP1043A寄存器每次ADC有10ms的取样时间,然后在10ms之后输出平均值。因此,这些寄存器至少每10ms读出一次实际的平均值。这种读取方式同样适用于CS1和CS2的电流读出。
对于控制环,高速信号总是从VS1的高速ADC处送来,低速信号通常来自VS3的低速ADC。当然,在软启动期间或在响应负载OVP期间或其他故障条件下,ADP1043A可以关闭从VS3到VS1的低速调节点。
(1)VS1的工作
VS1用于监视和保护LC输出的高边OrFET上边的电源电压,这是电源的高频反馈环。VS1在电源轨上的检测点,通常是在VS1端处的共模信号,需要一个外部电阻分压器,如图6中的电阻分压器是必需的,原因在于ADP1043A的VS1的ADC输入范围为0~1.55V,这个分压信号在内部被送到了一个高速和一个∑-△的ADC处,再由其ADC输出到数字滤波器。
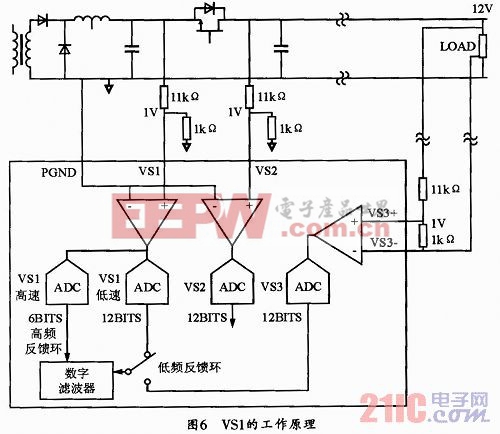
高速ADC有2MHz带宽,以25MHz时钟运行,它有±18mV的范围,当取样速率为200kHz时,为0.6mV的模数转换噪声,增加取样速率到400k Hz,噪声增加到1.2mY。在负载过压时,电源从VS1检测点调节,其它从VS3检测点调节。
(2)VS2的工作
VS2典型用于监视和保护电源的输出,及下游的OrFET,它用于与VS1去控制OrFET的栅驱动的开启。VS2检测点在电源轨上,需要一个外部的电阻分压器,送入正常的1V共模信号给VS2端。电阻分压器是必需的,因为ADP1043A的VS2 ADC输入范围为0~1.55V,这个分压器降下信号电平从内部送入一个ADC,VS2 ADC的输出送到VS2电压寄存器。
(3)VS3的工作
VS3±用于监视和保护远处负载的电压。是一个完整的差分输入,也是主反馈检测点。用于电源控制环路。
VS3检测点也要求一个外部电阻分压器,以将合适的1V共模信号给VS3±端。而且这个电阻分压器也是必需的,ADP1043A的VS3的ADC输入电压范围为0~1.55V,经过分压器分压后送入一个ADC,再由ADC输出到数字滤波器。
2.5 模数变换器ADCs
ADP1043A包括数个ADCs,高速ADC在VS1工作部分已经叙述。其它ADCs是低速高分辨率,它们有1kHz的带宽和12位的分辨力,每个ADC
有各自的电压基准。每个ADC的数字输出,均可通过适当的寄存器来读取。以保障意外的数据失效。
2.6 数字滤波器
电源的环路响应可以通过调整内部数字滤波器来实现,采用的是一个Ⅲ型的滤波器结构。改变环路响应可以设置低频增益、零点位置、极点位置及高频增益。这里推荐AD公司软件,软件GUI用于调节滤波器,可以显示出滤波器在bode图中的响应,并可以计算整个电源的稳定临界点。
从检测电压到周期,滤波器的传输函数计算公式如下式: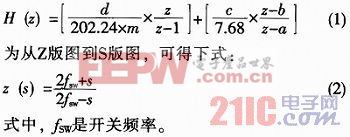
数字滤波器插入相位延迟到控制环中,数字滤波器电路将占空比信息送到PWM电路,然后开始每个新的开关周期。因此,附加的相位延迟到每个相位区间,φ由滤波器方框图插入,为
式中,fC为跨越频率,fSW为开关频率。在1/10开关频率处,相位延迟为18°,GUI结合此相位延迟进入计算。
两个寄存器的设置允许两个性质不同的滤波器响应。主滤波器也称正常模式滤波器,是由可编程寄存器0*60到寄存器0*63来控制的;其他滤波器称作轻载模式滤波器,其由可编程寄存器0*64到寄存器0*67来控制。ADP1043A用轻载模式滤波器,仅在负载电流在阈值下时才工作。
AD软件GUI允许用户调节轻载模式滤波器,与正常模式滤波器以相同方式管理。
此外,在软启动过程中,在使用数字滤波器的不同设置方式,软启动滤波器的值对应公式(1)中的a、b、c,其值为0,d的值通过软启动滤波器的增益设置来调节。
2.7 PWM和同步整流输出
PWM和SR输出用于控制初级侧驱动和同步整流驱动,这些输出可以用于几个控制电路拓扑,包括全桥、相移ZVS、交错式双晶正激变换器,上升沿,下降沿之间的延迟可以独立调节,要特别注意防止交叉导通,图7所示的就是一个全桥移相的实例(具有同步整流的全桥)。
IC-ADP1043A 电源 数控 全能 最新 相关文章:
- 最新全能数控电源IC-ADP1043A(六)(02-07)
- 最新全能数控电源IC-ADP1043A(五)(12-01)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)