光耦HCPL-316J的应用
摘要:光耦HCPL-316J是Agilent公司早几年前推出的产品,在国外应用较为广泛。文中介绍了光耦HCPL-316J的基本工作原理,给出了实际应用电路,结合实验所得结果,分析该光耦的优缺点,并对在实际应用中的注意事项进行了阐述。
关键词:IGBT;施密特特性;单极性驱动;续流;逐周限流
众所周知,传统的IGBT的过流保护与驱动回路是由两个完全独立的电路组成:由过流保护电路判断实际电机电流是否到达电流保护值,如到达,则驱动电路实施对IGBT的关断。过流保护与驱动回路分开不仅造成电路复杂、调试困难,而且增加制造成本,降低产品可靠性。基于克服此缺点,Agilent公司适时的推出光耦HCPL-316J,把IGBT的过流保护与驱动回路合成在一起,大大简化了电路设计,为进一步提高产品可靠性提供了可能。其主要特点有:
◇可以驱动级别达Ic=150A/Vce=1200V的IGBT,满足大多数中小功率的驱动需求;
◇反馈的故障信号为光隔离的,传输延迟典型值为1.8μs;
◇开关速度延迟最大为500ns;
◇内部自带Vce、具施密特特性的欠电压保护,并且在保护时对IGBT实施软关断。
1 光耦HCPL-316J的工作原理简介
HCPL-316J的内部结构如图1所示,引脚如图2所示。
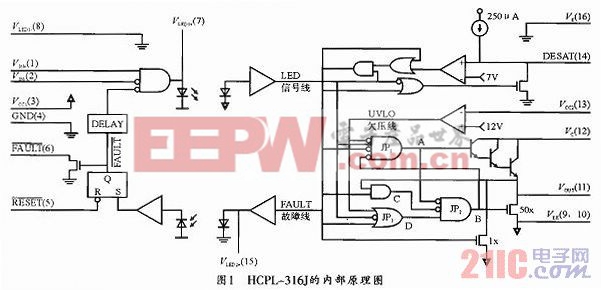

若VIN+、VIN-正常输入,脚14没有过流信号,且VCC2-VK≥12V即输出驱动,驱动信号输出高电平、故障信号输出高电平、欠压信号UVLO输出低电平。首先这3路信号共同输入到JP3,D点低电平,B点也为低电平,50xDMOS处于关断状态。此时JP1的输入的4个状态从上至下依次为低、高、低、低,A点高电平,驱动三级达林顿管导通,IGBT也随之开通。
若IGBT出现欠压,则不管输入状态如何,驱动输出VOUT均会被50xDMOS管拉低(接近VEE);若IGBT出现过流信号(脚14检测到IGBT集电极上电压≥7V),而不管输入驱动信号是否继续加在脚1,50xDMOS被关断,1×DMOS导通,IGBT栅射集之间的电压慢慢放掉,实现慢降栅压。当VOU T=2V时,即VOUT输出低电平,50xDMOS导通,IGBT栅射集迅速放电。故障线上信号通过光耦,再经过RS触发器,Q输出高电平,使输入光耦被封锁。
从图1可以看出,HCPL-316J可分为输入IC(左边)和输出IC(右边)二部分,输入和输出之间完全能满足高压大功率IGBT驱动的要求。表1所列是HCPL-316J引脚功能描述。

2.1 带故障保护的典型直流伺服系统的驱动电路(方案1)
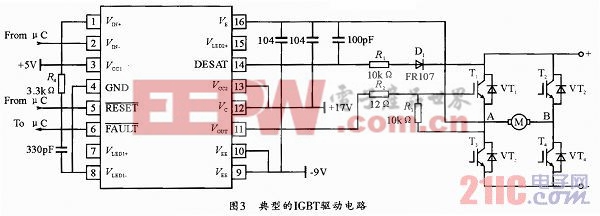
图3中仅画出一个IGBT的驱动回路,其余3路类同,并且4路光耦的RESET、FAULT全部连接在一起。
2.2 电路工作原理
如图3,当IGBT管T1导通时,从芯片内部恒流源(250μA)流出的电流分别在电阻R1、二极管D1上产生压降VR1、VD1,加上T1的导通管压降Vce,当VR1+VD1+Vce>7V时,则:
(1)VOUT输出变为低、对T1实施软关断并锁定,防止流过IGBT的电流进一步上升;
(2)同时,6脚的故障信号立刻变为低并送到上位机,上位机可以依据此故障信号作PWM开度限制或全关断处理;
(3)上位机在接收到故障信号后的下一PWM周期,在送PWM开度的同时,送出一路RESET信号(低有效,低电平宽度≥100ns),允许再次开通IGBT,如此周而复始的循环,实现电流保护的逐周限流。由图3组成的驱动系统测得的电流保护波形如图4所示。
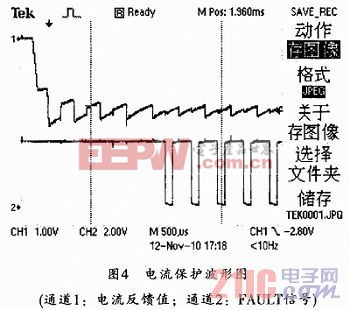
图3中,电阻R1需要根据实际的电流保护值大小进行调整,估算公式如下:
R1=(7-VD1-Vce)/0.25(kΩ)
式中,VD1-二极管D1上产生压降(V)
Vce-IGBT的导通管压降(V)
例如,对FS100R12KT3管,在管芯结温为125℃、流过电流为100A时,其Vce≈2.4V,假定此时VD1≈0.7V,则
R1=(7-VD1-Vce)/0.25=(7-2.4-0.7)/0.25=15.6(kΩ)
2.3 另一种带故障保护的伺服系统的驱动电路(方案2)
在图3的基础上,仅2个上管的驱动保护采用光耦HCPL-316J,2个下管的驱动直接采用普通的光耦如TLP250、A3120等,电路更为简洁,同样也可达到4路均采用光耦A316J的过流保护效果(实测的电流保护波形同图4)。
3 两种方案的电流保护波形一致性分析
从两种方案所得的实际电流保护波形是一样的实际结果来看.说明方案1与方案2本质上并没有区别。究其原因,主要是本驱动系统主回路驱动方式均采用单极性的特性决定的,在图3中,假设在正方向的速度设定下,完整的一个驱动周期如下:
(1)T1、T3导通,电流从电源+→T1→A→M→B→T3→电源-,正向流过电机M,电流增大,直到电流限幅值或电流保护值;
(2)T1断、T3保持导通,电流从A→M→B→T3→VD3,电流方向仍为+,处于续流阶段;在此阶段,电流处于下降趋势,幅值必定比a阶段小,所以在此阶段,即使下管驱动采用光耦A316J,也必不会达到光耦A316J的电流保护点,因此,下管采用光耦A316J与采用普通驱动光耦的结果是一样的;
(3)T1、T3导通,电流从电源+→T1→A→M→B→T3→电源-,正向流过电机M,电流增大,直到电流限幅值或电流保护值;
(4)T3断、T1保持导通,电流从A→M→B→VD2→T1,电流方向仍为+,处于续流阶段;同样,在此阶段,电流处于下降趋势,幅值必定比c阶段小,也必不会达到光耦A316J的电流保护点。
所以,下管是采用光耦A316J或采用普通驱动光耦,得到的电流保护结果是一样的,从电路简介性看,可采用普通光耦,且价格相对低点;从减少所需器件种类来看,可采用A316J,价格相对高点。
4 注意事项
在两种方案电路中,均要关注:
(1)负载问题:在图3中,如果负载为电感性负载,则由于续流是通过二极管回路进行,即电流下降梯度非常慢,假使在下一周期只要一打开IGBT,光耦马上检测到过流信号,在不大于3μs内实施对IGBT实施软关断,即在一个PWM周期内,IGBT最小导通时间为此延时时间。假定在此段时间内电流的增加多于下降,则会随着导通时间的加长,电流越来越大,超越IGBT的承受能力,造成IGBT损坏,这一点在应用中必须注意;
(2)时序问题:在上电时,如果光耦供电电源未稳定之前,VIN+、VIN-之间即满足VOUT输出为高的条件,则可能会造成驱动输出电平不够高、IGBT处于放大区的工作状态,容易造成IGBT的损坏,所以上电时,一定要保证在供电电源充分稳定后,再允许IGBT工作;同样,掉电时,也要充分保证光耦供电电源在未跌落之前关断驱动VOUT的输出,否则,驱动VOUT输出很容易出现高频抖动(如图5所示:即是由于电源已由17V跌落到14V时,还未关断送出到VIN+、VIN-的输出,结果在运行过程中突然掉电即发生IGBT损坏),更是对IGBT的安全工作造成威胁;
- 那些经典的过流保护电路应用举例(12-09)
- 便携应用的电源管理挑战(12-09)
- 技术解析:单片机应用系统的可靠性设计(12-09)
- 多路输出开关电源的设计以及实际应用原则(12-09)
- 变频电源分类及其应用领域详细介绍(12-08)
- 浅析工业领域对UPS电源的应用要求(12-08)