基于INtime的雷达实时操控显示终端设计
摘要:为了兼顾雷达操控显示终端的实时性能和强劲的图形显示能力,提出了基于INtime实时扩展的雷达实时操控显示终端设计方案。通过INtime实时进程完成雷达实时控制、数据处理等实时任务,通过Windows进程完成雷达数据等的快速显示,利用INtime的共享内存和信号量机制实现两进程之间的通信。经过测试仿真及与雷达实装的现场运行,获得了良好的效果,验证了该方案的适用性。
0 引言
雷达操控显示终端作为雷达系统的重要组成部分,用于雷达空情目标显示、数字原始视频显示、雷达控制、系统监测等,随着计算机性能的提高和多功能需求的日益增强,将雷达的实时控制、数据处理等实时应用集成在雷达的操控显示终端中已日益成为趋势,用户的界面审美需求也对终端的图形加速、多媒体以及三维场景的显示性能提出更高的要求。目前,国内外的雷达操控显示终端产品很难同时满足上述要求。通常实时操作系统为保证其实时性,对图形的支持能力都较弱,一般只支持简单的图形显示,目前尚没有一款独立的操作系统能够既满足实时性要求,又为用户提供强有力的图形处理支持。
为了兼顾雷达操控显示终端的实时性能和强劲的图形显示能力,本文提出了一种在嵌入式Window XP(XPE)中基于INtime实时操作系统的雷达实时操控显示终端设计方案。终端采用通用PC硬件平台,利用实时多任务操作系统INtime的实时性完成雷达系统的实时控制和数据处理任务,同时充分利用Windows操作系统强大的图形界面功能,实现雷达目标、状态、原始视频、电子地图等显示功能。
1 INtime实时操作系统介绍
INtime是TenAsys公司为满足Windows平台上硬实时系统严格的响应时间要求而开发的一个实时子系统,其系统结构体系如图1所示。
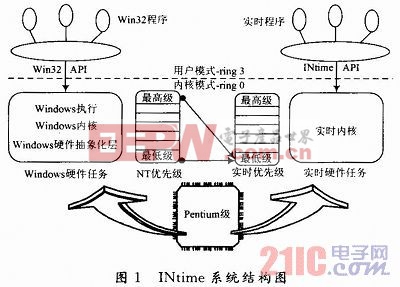
INtime实时系统在计算机启动加载Windows操作系统时同时被加载,共享相同的CPU和中断硬件,但在其他方面相互独立。当实时活动必须发生时,计算机上下文将切换到该实时操作系统,这些活动完成后,计算机上下文将切换回Windows操作系统。实时进程运行在INtime内核上,非实时进程运行在Windows内核上。INtime为Windows进程提供了扩展函数库(NTX API),使Windows进程能够共享在实时内核上创建的对象,从而实现Windows进程和INtime进程之间的数据共享和同步。
INtime内核提供了一个基于优先级的抢先式多任务调度系统,可支持256个线程优先级,优先级高的线程优先调度执行,同一优先级的线程采用时间片轮转调度算法。通过对线程赋予不同的优先级,严格保证各个任务的先后执行次序。在进程通信和同步方面。INtime通过共享内存与Windows进程进行数据交换,通过信号量进行进程的同步控制。INtime内核提供了高精度的系统计时器,最高精度达100μs,可满足大多数要求苛刻的应用程序的实时性要求。INtime支持多处理器系统,可以划分出一个处理器为INtime操作系统及其实时进程专用,提高了系统的可靠性。INtime还提供了与Windows环境兼容的实时编程接口,支持Win32的API,实现了一套实时扩展函数,通过VC++编译环境开发,具备良好的实时调试器。
2 系统总体结构
雷达实时操控显示终端是一个集实时通信、控制、数据处理及显示的综合多任务系统,既有实时性要求很高的雷达设备控制、跟踪数据采集和跟踪数据处理等任务,又有实时性要求较低的数据管理,状态控制,雷达目标、数字原始视频、电子地图显示等任务,所以在系统结
构设计时,把实时和非实时任务分开运行。实时任务运行在INtime内核中,主要完成对跟踪雷达分系统、光电跟踪分系统的跟踪数据实时采集和处理。根据处理结果实时控制跟踪伺服分系统,并将跟踪天线对准目标,以达到跟踪功能,同时完成与非实时进程的数据同步。非实时任务运行在Windows内核中,主要完成雷达分系统非实时的状态控制和数据显示,同时完成系统数据的存储等管理,其系统结构如图2所示。

雷达操控显示终端在硬件选型上,选用加固一体计算机,为更好地发挥计算机的图形处理能力,计算机显卡具备2D/3D硬件加速能力。 CPU选用Intel酷睿双核,并将INtime配置成独占模式,即INtime独自占用一个CPU核运行实时进程,Windows占用另一核,这样可提高系统的稳控性和实时性。终端计算机内置一块定时接口板,用于产生雷达系统同步时钟,板卡通过PCI总线向终端计算机提供时钟中断信号。终端与雷达其他分系统之间的通信通过网络传输。
为保证系统的健壮稳定,Windows操作系统采用裁剪的嵌入式XPE操作系统,该系统设计成基于休眠方式启动、内存保护方式运行模式,既保证了系统的快速启动,又保证了系统的稳定可靠。关于XPE操作系统的设计已有较多文献资料参考,本文将不做详细介绍。
3 终端软件设计
终端软件采用VC++开发,基于上述系统结构,软件主要包括INtime的实时进程和Windows的非实时进程,各进程根据任务需求划分相应的任务和功能模块,软件功能结构图如图3所示。
显示 终端 设计 操控 实时 INtime 雷达 基于 相关文章:
- 高效地驱动LED(04-23)
- 基于实时时钟芯片X1228的电源控制器设计(03-14)
- 锂离子电池保护器及监控器(06-20)
- 利用LDO改善白光LED的匹配度(06-20)
- 如何延长基于微控制器设计的电池寿命(06-24)
- 高压开关电源的应用电路设计(06-30)