如何延长基于微控制器设计的电池寿命
时间:06-24
来源:互联网
点击:
电池供电设备,不管是电动牙刷、剃须刀、手机、个人数字助理(PDA)、MP3播放器,还是手无法够到的遥控设备,都成为人们日常生活的一部分。因此,电源管理对当今的嵌入式设计工程师来说是一件相当重要的的事。普遍存在的微控制器在许多设备的应用中为设计工程师提供了大量管理电源要求的方法。不同种类的MCU自身就拥有一系列节省电流消耗及许多节能特性。但是,在基于微控制器的设计中,对电源的管理不仅仅是选择一个正确的微控制器这么简单。
电源管理同样也需要最有效地使用MCU自身的降低电流消耗及节能特性的发展策略。在系统层面上,即使你所选择的MCU是独立的,同样能够使用许多策略来进一步延长您的应用设备的电池寿命。
应用实例:无线自行车里程表
接下来,我们将以无线自行车里程表为例,来展示有效的电源管理。该里程表由三部分模块组成:一个位于车把上的控制面板,一个位于车轮中的速度传感器及一个位于骑车者头盔上的显示器。
速度传感器将自行车的转速反馈给控制面板,控制面板则计算诸如:行车速度、行车里程、行车时间及能量消耗此类信息,并将计算好的信息传达给显示器。下方图1为一个自行车里程表控制面板的方框图。
低功耗模式数量的增加
MCU几何形状趋小型化,以减小芯片面积,这会导致晶体管无法承受3V或3V以上电压的直接作用。因此,就要在内部逻辑中使用电压调整器来降低电压。
遗憾的是,这些电压调整器会加大MCU的电流消耗。但是,由于功率大小等于电压乘以电流,因此一个带有调整器的1.8V至3V的系统功耗仍比一个不带调整器的5V的系统功耗要低。
MCU很强地依赖于电源管理模式,在降低整体的工作电流的同时仍能支持调节电源和加快时钟速度。新型MCU能够提供许多低功耗模式来满足这些要求,同时保持系统灵活性。飞思卡尔公司的MC9S08GB60 MCU有四种低功耗模式:深度停止状态(stop1)、中度停止状态(stop2)、轻度停止状态(stop3)和等待模式。
在等待模式下,通过关闭CPU时钟来降低功耗,但是系统时钟由其它MCU外设来支持工作,如:模-数(A-D)转换器、计时器或串行通信模块。该模式在外设需要工作的情况下用于降低功耗是相当有效的,但是CPU在外设完成任务之前不能工作。
在我们的例子中,等待模式在串行外设接口(SPI)用于与射频(RF)收发器通信情况下使用。
要想更进一步降低功耗,可使用三种停止模式。Stop1、Stop2、Stop3分别提供不同级别的降低功耗操作。
Stop3是三种停止模式中功能性最强的一个。在Stop3模式下,片上电压调整器处于省电模式,但仍能提供最低限度的调节来保留随机存储器(RAM)和输入/输出(I/O)寄存器的内容。几个中断源和复位能够将MCU从Stop3模式下唤醒。Stop3 是三种停止模式中唯一一个低电压抑制(LVI)模块和晶振仍能工作的模式。
在我们的例子中,在从速度传感器读取速度值之间的一段时间里,MCU处于等待状态,此时可使用Stop3模式。Stop3模式下工作的实时接口(RTI)功能可用于及时唤醒MCU以进行下次读取。
Stop2的功能性较之Stop3要弱些,但其功耗更低。在Stop2模式下,电压调整器处于节电(powered down)状态。但是,RAM内容仍然保存着。I/O寄存器也处于节电状态,并且当它从停止模式被唤醒时需要进行重新配置。在Stop2中,能够唤醒MCU的中断源更少,但是仍具有RTI功能。回到我们的例子中来看,Stop2可取代Stop3来更进一步降低功耗。由于该模式下RTI功能和RAM仍在工作,所以速度读取之间的时间仍可被测得。
Stop1是MCU中功耗最低的模式。在该模式下,电压调整器及所有外设、CPU、RAM和I/O都完全进入节电状态。只有复位和IRQ中断脚能够唤醒MCU。当MCU能够进入节电状态,但在外部激励下,如按下按钮的情况下仍需做出反应时可用Stop1模式。
在自行车里程表这个例子中,当里程表处于节电状态时可进入Stop1模式。节电状态下的Stop1模式是MCU中可能存在的功耗最小的模式,而不需从芯片上切断电源。为什么不从芯片上将电源彻底切断呢?因为从芯片上切断电源需要使用一个更为昂贵的拨动开关。
同样的,MCU可使用一个与中断脚相连的按钮开关来实现许多不同的作用。这些不同的作用取决于系统当前的状态。因此,Stop1模式能够保持设计简单、成本低廉、并且几乎不消耗电流,堪称完美。
时钟管理
许多设计师将低功耗与低时钟频率等同起来。而事实上,根据MCU正在进行的不同操作及MCU可使用何种低功耗模式,以最高的速度工作事实上能够降低功耗。
如果MCU拥有一个有效的低功耗模式,那么使它最长时间地处于该模式下能够最大限度地降低功耗。因此,如果CPU在返回睡眠模式之前需要执行代码,那么以可能的最高速度完成代码执行,然后返回低功耗模式比持续以低速度工作消耗的电流少。
让我们再来看看自行车里程表这个例子,假设控制面板每秒钟更新速度一次,并且需要循环16,000个总线周期来计算数据并在显示器上显示出来。由典型的32kHz晶体工作,并且假设有一个普通的一分为二的总线时钟,我们就能够拥有16KHz的总线,在这种情况下,需要使用整整一秒钟来完成计算。
现在,如果我们可以使用8MHz的总线时钟,就可以仅花费2毫秒来完成计算,剩余的998毫秒可处于低功耗模式下。
当然,并非MCU须执行的每项任务都会得益于高速性能。在我们的例子中,如果数据速度相当的慢,无线通信所需的时间可能不需要8MHz的总线速率。因此,在这种情况下,要想将功耗最小化,我们就应该尽可能慢地运行MCU,直至无线通信结束。
因此,我们需要一个时钟灵活的MCU,如飞思卡尔公司的MC9S08GB60 MCU。拥有该设备,您可以使用高频晶体、低频晶体或内部振荡器。
拥有任一此类时钟源,就可以随意地使用片上频率锁定环(FLL)使总线速度成倍地升高或降低,来满足任务需求并且使功耗达到最小化。图2为自行车里程表例子中不同操作模式下功耗的改变情况。
电源管理同样也需要最有效地使用MCU自身的降低电流消耗及节能特性的发展策略。在系统层面上,即使你所选择的MCU是独立的,同样能够使用许多策略来进一步延长您的应用设备的电池寿命。
应用实例:无线自行车里程表
接下来,我们将以无线自行车里程表为例,来展示有效的电源管理。该里程表由三部分模块组成:一个位于车把上的控制面板,一个位于车轮中的速度传感器及一个位于骑车者头盔上的显示器。
速度传感器将自行车的转速反馈给控制面板,控制面板则计算诸如:行车速度、行车里程、行车时间及能量消耗此类信息,并将计算好的信息传达给显示器。下方图1为一个自行车里程表控制面板的方框图。
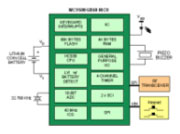 |
| 图1:无线自行车里程表控制面板方框图,显示了当今MCU不断增强的电源管理特性 |
MCU几何形状趋小型化,以减小芯片面积,这会导致晶体管无法承受3V或3V以上电压的直接作用。因此,就要在内部逻辑中使用电压调整器来降低电压。
遗憾的是,这些电压调整器会加大MCU的电流消耗。但是,由于功率大小等于电压乘以电流,因此一个带有调整器的1.8V至3V的系统功耗仍比一个不带调整器的5V的系统功耗要低。
MCU很强地依赖于电源管理模式,在降低整体的工作电流的同时仍能支持调节电源和加快时钟速度。新型MCU能够提供许多低功耗模式来满足这些要求,同时保持系统灵活性。飞思卡尔公司的MC9S08GB60 MCU有四种低功耗模式:深度停止状态(stop1)、中度停止状态(stop2)、轻度停止状态(stop3)和等待模式。
在等待模式下,通过关闭CPU时钟来降低功耗,但是系统时钟由其它MCU外设来支持工作,如:模-数(A-D)转换器、计时器或串行通信模块。该模式在外设需要工作的情况下用于降低功耗是相当有效的,但是CPU在外设完成任务之前不能工作。
在我们的例子中,等待模式在串行外设接口(SPI)用于与射频(RF)收发器通信情况下使用。
要想更进一步降低功耗,可使用三种停止模式。Stop1、Stop2、Stop3分别提供不同级别的降低功耗操作。
Stop3是三种停止模式中功能性最强的一个。在Stop3模式下,片上电压调整器处于省电模式,但仍能提供最低限度的调节来保留随机存储器(RAM)和输入/输出(I/O)寄存器的内容。几个中断源和复位能够将MCU从Stop3模式下唤醒。Stop3 是三种停止模式中唯一一个低电压抑制(LVI)模块和晶振仍能工作的模式。
在我们的例子中,在从速度传感器读取速度值之间的一段时间里,MCU处于等待状态,此时可使用Stop3模式。Stop3模式下工作的实时接口(RTI)功能可用于及时唤醒MCU以进行下次读取。
Stop2的功能性较之Stop3要弱些,但其功耗更低。在Stop2模式下,电压调整器处于节电(powered down)状态。但是,RAM内容仍然保存着。I/O寄存器也处于节电状态,并且当它从停止模式被唤醒时需要进行重新配置。在Stop2中,能够唤醒MCU的中断源更少,但是仍具有RTI功能。回到我们的例子中来看,Stop2可取代Stop3来更进一步降低功耗。由于该模式下RTI功能和RAM仍在工作,所以速度读取之间的时间仍可被测得。
Stop1是MCU中功耗最低的模式。在该模式下,电压调整器及所有外设、CPU、RAM和I/O都完全进入节电状态。只有复位和IRQ中断脚能够唤醒MCU。当MCU能够进入节电状态,但在外部激励下,如按下按钮的情况下仍需做出反应时可用Stop1模式。
在自行车里程表这个例子中,当里程表处于节电状态时可进入Stop1模式。节电状态下的Stop1模式是MCU中可能存在的功耗最小的模式,而不需从芯片上切断电源。为什么不从芯片上将电源彻底切断呢?因为从芯片上切断电源需要使用一个更为昂贵的拨动开关。
同样的,MCU可使用一个与中断脚相连的按钮开关来实现许多不同的作用。这些不同的作用取决于系统当前的状态。因此,Stop1模式能够保持设计简单、成本低廉、并且几乎不消耗电流,堪称完美。
时钟管理
许多设计师将低功耗与低时钟频率等同起来。而事实上,根据MCU正在进行的不同操作及MCU可使用何种低功耗模式,以最高的速度工作事实上能够降低功耗。
如果MCU拥有一个有效的低功耗模式,那么使它最长时间地处于该模式下能够最大限度地降低功耗。因此,如果CPU在返回睡眠模式之前需要执行代码,那么以可能的最高速度完成代码执行,然后返回低功耗模式比持续以低速度工作消耗的电流少。
让我们再来看看自行车里程表这个例子,假设控制面板每秒钟更新速度一次,并且需要循环16,000个总线周期来计算数据并在显示器上显示出来。由典型的32kHz晶体工作,并且假设有一个普通的一分为二的总线时钟,我们就能够拥有16KHz的总线,在这种情况下,需要使用整整一秒钟来完成计算。
现在,如果我们可以使用8MHz的总线时钟,就可以仅花费2毫秒来完成计算,剩余的998毫秒可处于低功耗模式下。
当然,并非MCU须执行的每项任务都会得益于高速性能。在我们的例子中,如果数据速度相当的慢,无线通信所需的时间可能不需要8MHz的总线速率。因此,在这种情况下,要想将功耗最小化,我们就应该尽可能慢地运行MCU,直至无线通信结束。
因此,我们需要一个时钟灵活的MCU,如飞思卡尔公司的MC9S08GB60 MCU。拥有该设备,您可以使用高频晶体、低频晶体或内部振荡器。
拥有任一此类时钟源,就可以随意地使用片上频率锁定环(FLL)使总线速度成倍地升高或降低,来满足任务需求并且使功耗达到最小化。图2为自行车里程表例子中不同操作模式下功耗的改变情况。
电源管理 嵌入式 MCU 电流 传感器 显示器 电压 飞思卡尔 射频 收发器 总线 振荡器 电路 LED 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 高效地驱动LED(04-23)
- 电源SOC:或许好用的“疯狂”创意(07-24)
- 实现智能太阳能管理的微型逆变器应运而生(05-06)