红外成像跟踪系统中的电磁兼容问题研究
1 引言
电磁兼容(electro magnetic compatibility,emc)是一门以电磁场理论为基础,包含了信息、电工、电子、通信、材料、结构等学科的边缘学科,也是一门研究在有限的空间、时间和频率资源条件下,各种电工电子设备或系统在同一电磁环境中可以相互兼容而不致引起其性能降低的应用科学技术[1]。随着大规模集成电路和电力电子技术的飞速发展,电机及其控制系统已经成为一种将电机、功率电子、微电子融为一体的综合性自动化系统,也使系统电磁环境的复杂性成倍增加。在这种复杂的电磁环境中,如何尽量减小各设备间的电磁影响,保证系统和各设备的正常运行,是一个需要深入研究的课题。本文以某种红外成像跟踪系统为研究对象,对其电磁环境进行了分析,并对其设计和运行过程中的电磁兼容问题进行了研究与改进,解决了图像传输和目标跟踪的不稳定问题。
2 红外成像跟踪系统简介
红外成像跟踪系统是一种集光、机、电为一体的平台系统,其主要功能是对红外目标进行稳定成像与跟踪系统结构框图如图1所示。

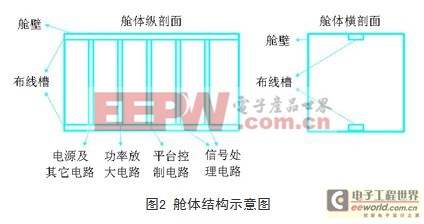
台体采用三自由度框架式结构,可以实现滚转、俯仰及方位轴上的运动。红外成像组件安装在台体上,用来敏感目标和背景的红外红辐射并转换为电信号送给信号处理电路。信号处理电路在实时图像中区分目标和背景,截获目标,跟踪目标图像,将跟踪误差信号送至平台控制电路,同时将图像信号送入显示器实时显示。平台控制电路根据目标角误差信号形成控制信号,经功率放大后驱动台体转动,保证稳定跟踪目标并使目标成像位于图像的中心。速率陀螺和电位计敏感台体的运动,并将台体运动的速度和位置信息反馈回平台控制电路,实现闭环控制。除台体及安装在台体上的电机、速率陀螺、电位计和红外成像组件外,整套系统都安装在一个长宽高分别为40cm×20cm×20cm的舱体中,所有电源及信号的走线均位于舱体上下表面的两个布线槽中,舱体纵剖面和横剖面示意图如图2所示。在这套系统中,既有高频信号电路又有低频信号电路,既有强电电路又有弱电电路,既有频繁开关动作的电路又有对扰动极为敏感的微弱信号电路,电磁环境比较复杂,若在设计时不考虑电磁兼容性,系统的性能势必会受到电磁干扰的影响而大打折扣,甚至不能正常工作。
3 系统电磁环境分析
理论和实践的研究证明,不管复杂系统还是简单装置,任何一个电磁干扰的发生必须具备三个基本条件:首先应该具有干扰源,其次是具备干扰传播途径,最后必须有被干扰对象(敏感设备)的响应[1]。因此干扰源、传播途径和敏感设备统称电磁干扰三要素。在对文中系统进行电磁环境分析的过程中,我们更多地将眼光放在系统的层面上,分析各功能电路之间(例如功率放大电路和信号处理电路之间)的电磁干扰和电磁兼容问题。
在本系统中,功率放大器和力矩电机是很强的电磁干扰源。
本系统是一个高精度的伺服控制系统,对定位精度和响应速度都有很高的要求,因此功率放大电路部分采用了基于电力电子器件的脉宽调制型功率放大器,简称pwm功率放大器,它能实现宽范围的速度和位置控制并具有优良的性能。pwm功率放大器是利用全控型电力电子器件的开关特性来调制固定电压的直流电源,电力电子器件按一个固定的频率来接通和断开,并根据需要改变一个周期内“接通”和“断开”的时间长短,通过改变直流伺服电动机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速,因此这种pwm功率放大器又称为“开关驱动装置”。由于pwm功率放大器通过电力电子器件周期性工作于通断状态来控制电机转速,主回路功率转换电路的高压切换是无法避免的,电枢两端的电压呈脉冲状,电压变化率du/dt的幅度一般都很高,高压开关脉冲的频率较高且脉冲前后的边缘陡峭,产生了丰富的高次波谐波;电机的电枢电流呈三角形,且在开关切换时电流变化率di/dt也很大,大脉冲电流引起的磁或电磁的干扰流过幅值大而且快速变化的电流回路与地形成的环路,就会产生磁场耦合,形成严重的干扰,使原先电路未予描述的寄生电容和配线电感对电路的影响就不能被忽略[3]。功率放大电路产生的谐波和干扰通过导线和电路的分布电感、分布电容耦合到伺服系统的控制电路逻辑元件和其它系统的输入端,影响其它电路的稳定和正常运行。
为了满足系统对跟踪速度的要求,本系统选用了有刷直流力矩电机来驱动台体,其正常工作电流约为2安培,堵转电流可以达到3安培以上。直流电机在运转过程中,线圈中电流不断换向,会造成电磁波辐射,当电机转速很高时,辐射电磁波的频率也会较高[8]。另外
- A/D转换器THS1206在红外成像系统中的应用(12-07)
- 双向太阳能智能跟踪系统(10-16)
- 一种基于开关电源的系统电磁兼容设计方案探讨(12-09)
- 基于LTMR4644的稳压电源解决(12-08)
- 详解如何解决驱动单元设计中的电磁兼容问题(12-08)
- 电磁兼容性设计的基本原理(12-08)