单相UPS逆变器的多环控制策略研究
摘要:在单相不间断电源(UPS)控制系统中,UPS的被控量是交流量,常用的控制算法很难对交流量实现无差控制,因此提出了一种多环控制策略,以提高单相UPS逆变器的静态和动态特性。采用比例谐振调节器控制逆变器的输出电压,极大地提高了系统的静态特性;采用适当的前馈负载电流和负载电压,有效地改善了单相UPS逆变器的动态特性。建立了单相UPS逆变器的数学模型,并给出了比例调节器和比例谐振调节器的设计方法。理论分析和一台800 W逆变器样机的实验结果证明了该控制方案的可行性。
关键词:逆变器;不间断电源;比例谐振;多环控制
1 引言
UPS主要由蓄电池、充放电电路、逆变电路和控制系统等几部分组成,其中逆变电路及其控制系统是UPS电源的核心部分。单相UPS逆变器的被控量是50 Hz的交流量,而PI调节器不能对交流量实现无静差调节,要减小稳态误差,必须提高比例增益,但过高的比例增益,会降低系统的稳定性,因此PI控制算法不适合控制交流量。根据内模原理,要实现无静差控制,控制环前向通道上必须含有外部输入量的动态模型。重复控制算法能根据被控对象,在控制环的前向通道上形成被控对象的内模,从而实现对交流量的无静差控制。采用重复控制策略控制单相正弦波逆变器能得到较满意的性能,但算法较复杂,实现也较困难。单相逆变器的多环控制策略与双环控制策略相比,逆变器输出电压的波形有所改善,但仍存在静态误差。文献研究了单相逆变器的比例谐振控制算法,但没有考虑负载变化对系统的影响。针对以上问题,这里提出了基于比例谐振控制的多环控制策略。实验结果表明,与其他单相逆变器的控制策略相比,该控制方案是一种理想的控制方案。
2 单相UPS逆变器工作原理及数学模型
所研究的单相UPS逆变器采用单相全桥拓扑结构,如图1所示。
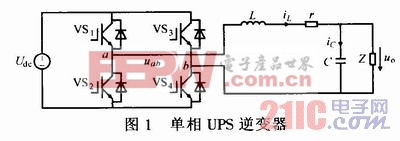
图中负载可为线性负载或非线性负载。对单相逆变器的4个IGBT开关VS1~VS4进行调制,将直流电压Udc调制成PWM脉冲电压,通过LC滤波器滤除高频谐波,在输出端得到幅值和频率都可调的正弦波电压。设m为调制度,根据电路定律,单相逆变器的数学模型为:
3 双环控制策略及其调节器参数的整定
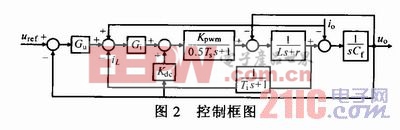
采用电感电流反馈控制(内环)和输出电压反馈控制组成的级联结构。采用比例谐振调节器对输出电压进行无静差调节,采用比例调节器控制电感电流。为应对负载变化引起的大范围扰动,在电压外环中引入负载电流前馈控制,负载电流前馈控制与电压调节器的输出共同构成了电感电流指令信号,整个控制框图如图2所示,Kdc为输出电压前馈系数。因为电压环与电流内环之间存在耦合,因此在电流内环中引入了输出电压的前馈。
3.1 电流调节器设计
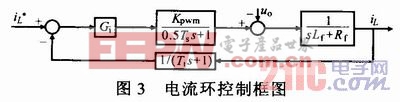
图3示出电流环控制框图。电流调节器采用比例调节器,Gci(s)=kip。电流环必须具有较高的动态性能,所以动态特性指标设定为:调整时间ts≤2 ms,最大超调量Mp20%,上升时间tr≤0.3 ms。为有效抑制开关频率附近(10 kHz及以上)的谐波,电流环截止频率应小于2kHz;为跟踪50 Hz的电流指令,电流环截止频率要大于500 Hz,因此电流环截止频率选择在500 Hz~2 kHz之间。
确定了上述指标和参数后,采用根轨迹法整定调节器的参数。调整kip使闭环主导极点在合适位置。根据上述动态指标,最终选择kip= 4.96,此时系统截止频率为1.572 kHz,阻尼比为0.521。当kip=4.96时,电流环根轨迹及阶跃响应如图4所示。

由图4b可得:tr=0.38 ms,tr=1.2 ms,Mp=10%,系统动态性能指标基本满足要求。此时电流环的幅值裕度为15.9 dB,相位裕量为56.2°,表明电流环具有良好的相对稳定性。
3.2 电压调节器设计
电压调节器为比例谐振调节器,传递函数为:
截止频率ω、比例系数Kp、谐振系数K,决定调节器的特性。ωc决定了调节器的带宽,减小ωc,可使调节器带宽变窄,带宽变窄后,调节器对控制信号的频率非常敏感,当频率等于ω0时,产生无穷大的增益,此时可实现无静差控制;当频率在ω0附近时,增益较小,不能实现无静差控制;当增加Kp,频带以外的幅值增加,而谐振频率处的幅值增幅不大,说明Kp对谐振环节无影响;随着Kr的增加,谐振频率以外的幅值几乎不变,但谐振频率处的幅值增幅相对明显,此特点有利于消除静态误差。Kp,Kr的变化,对谐振频率处的相位影响都很小。
根据图2可得逆变器输出电压为: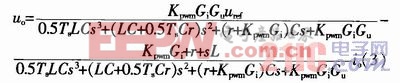
由式(3)可知,uo与指令电压uref负载电流io都有关。由于Gu在谐振频率附近有足够大的增益,故式(3)中第1项的值趋近于uref,而第2项的值趋近于零,即只要合理地整定调节器的参数,uo即可准确跟踪uref,此时系统具有较高的抗干扰特性。
根据工程经验,整定参数时ωc通常选择在5~15 rad·s-1之间,在此取ωc=10 rad·s-1,ωc确定后,Kp,Kr可按普通比例积分调节器的参数设定方法进行设定。在此取Kp=0.4944,Kr=30.9,校正后电压环的根轨迹和单位阶跃响应如图5所示。
- MOSFET选择策略详解(12-07)
- 分布式电源并网逆变器控制策略与仿真研究(04-25)
- 三相电压型PWM整流器前馈解耦控制策略(12-26)
- 小贴士:医疗电源的选择策略(11-18)
- 基于GIS的路灯控制管理系统的实施策略(11-14)
- 独立电源系统有源滤波器谐波和无功电流补偿策略研究(09-10)