光伏发电的最大功率点跟踪控制
扰动观测法的控制流程图如图3所示。其基本控制过程为:首先,让光伏电池按照给定的参考电压值Upv输出,测量此电压时的输出功率,即P(K-1),然后再在这个电压的基础上叠加一个电压扰动ΔU,测量叠加扰动电压后的输出功率,P(K)。比较P(K-1)和P(K)的大小,如果P(K)大于P(K-1),表明叠加电压扰动后输出功率增加,所给电压扰动方向是使输出功率增大方向,则继续施加相同方向的扰动,下一时刻电压为Upv=Upv+ΔU;如果P(K)小于P(K-1),表明叠加电压扰动后输出功率减小,所给电压扰动方向不是使输出功率增大方向,则给反方向的扰动,下一时刻电压为Upv=Upv-ΔU,这样循序渐进,使输出功率逐渐逼近光伏电池的最大功率点。 图3 扰动观测法控制流程图 扰动观测法的优点在于其结构简单,被测参数少,在光伏系统最大功率跟踪中广泛应用。但是,这种跟踪方法在系统已经跟踪到最大功率点附近时,扰动将使系统在最大功率点附近振荡,造成一部分功率损失;而且电压初始值和跟踪步长的选取对跟踪速度和精度有较大的影响,ΔU较小时光伏电池可能会长时间工作于低功率输出区,而且响应速度慢,不能快速跟踪光照强度的变化;ΔU较大时将加大最大功率点附近的振荡。 4 变步长扰动观测法 5 仿真验证 为了验证变步长扰动观测法的实际效果,进行了仿真研究。 在Matlab环境下,利用simulink工具,建立了光伏阵列的通用仿真模型和MPPT仿真控制系统[5]。 其中:U-光伏电池输出电压,Iph-光生电流,Id-二极管结电流,Rs-串联等效电阻,q-单位电荷(1.6×10-19),A-理想因子,K-玻尔兹曼常数,T-光伏电池表面温度,I0-光伏电池暗饱和电流, KI-短路电流温度系数,s-日照强度。 根据以上数学模型,结合SP75光伏电池模块组标准条件下测试参数[7],分别搭建Iph、I0、Uoc、Vt、K1仿真子模块,最后根据式(4)组合成光伏电池仿真模型如下: 图6 光伏阵列PV仿真模型 利用此模型建立最大功率点跟踪算法的仿真系统见图7,MPPT控制算法由M文件编写的S函数中实现。 (b)变步长扰动算法仿真波形 由仿真结果可知,采用固定步长扰动观测法,当步长较大时虽然动态跟踪速度快,但达到稳态后输出功率有一定波动,不够稳定。而采用变步长扰动观测法则不仅动态响应速度较快,而且稳态误差小。 6 结论 本文对常规扰动观测法加以了改进,提出了一种基于输出特性曲线变化率的变步长扰动观测法。通过仿真实验,表明变步长扰动控制方法能同时保证系统的动态性能和稳态性能。 参考文献 [1] 闵江威. 光伏发电系统的最大功率点跟踪控制技术研究.[硕士学位论文].武汉:华中科技大学,2006 [2] 马兆彪. 太阳能光伏并网发电系统的分析和研究.[硕士学位论文].无锡:江南大学,2008 [3] 余世杰,苏建徽等,带有MPPT功能的光伏阵列Matlab通用仿真模型,系统仿真学报[J],2005 [4] 冯冬青,李晓飞,基于光伏电池输出特性的MPPT算法研究,计算机工程与设计[J],2009,30(17) [5] 叶秋香. 光伏电池最大功率跟踪器的模糊控制及其应用.[硕士学位论文].上海:东华大学,2006 [6] KOUTROULIS E,KALAITZAKIS K,VOULGARIS N C.Development of a microcontroller–based , photovoltaic maximum powerpoint tracking control system [J].IEEE Transaction on PowerElectronics,2001 [7] WeidongXiao,Willianr G.Dunford .A Modified Adaptive hill climbing MPPT method for Photovoltaic Power Systems.35th Annua1 IEEE P0wer E1ectronic specialists conference, Germany,2004■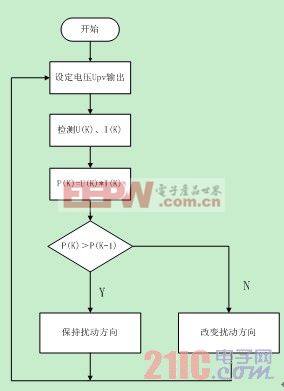

⑴光伏电池的简化等效电路如图5所示。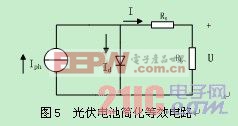
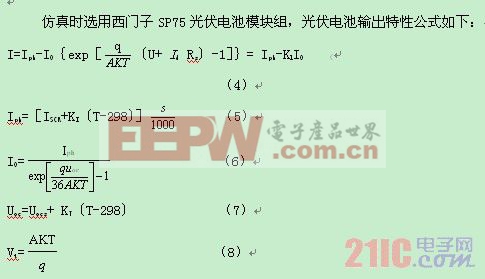
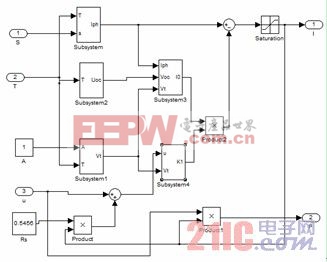

图8 (a)固定步长扰动算法仿真波形;
- 控制系统中常见的几种地线详解(10-13)
- 嵌入式碟式太阳能热发电控制器研制与应用(06-28)
- 基于金升阳电源的智能窗帘控制器的设计(03-20)
- 控制电源开关技术是影响电源稳定的一大因素(12-09)
- 基于ATmega16 的电液伺服阀反馈控制器设计方案(12-09)
- 基于单片机的电梯控制系统的应用设计(12-09)