基于ATmega16 的电液伺服阀反馈控制器设计方案
电液伺服阀在工程系统中有着广泛的应用。尽管液压系统具有维护困难、泄漏、噪声比大等缺点,但是对于大功率的自动控制系统,液压控制是其他控制形式所不能替代的。
随着电液伺服系统应用领域的拓展,对电液伺服阀提出了更高的要求,如控制精度高、动态响应快、成本低等。但由于外部环境的干扰或电液伺服阀本身的性能不足,会出现伺服阀输出压力抖动过大、输出压力偏高或偏低的问题。故设计此电液伺服阀反馈控制器,可实现电液伺服阀稳定精确地输出压力。
1 总体设计
电液伺服阀反馈控制器核心控制芯片采用AT-mega16 单片机,ATmega16采用先进的RISC 结构,代码执行速度高,工作可靠稳定。
外围电路的设计主要包括输入信号采集电路、电流信号输出电路以及故障切换电路三部分。
考虑工程实际应用需求及系统集成化要求,将两路控制电路集成使用一片ATmega16单片机实现控制。充分利用了单片机的资源,同时节约开发成本。
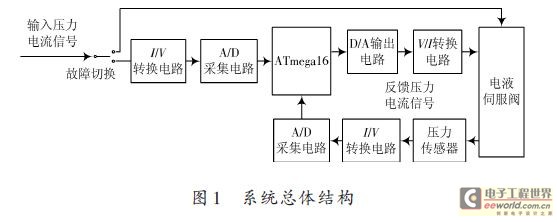
系统总体结构如图1所示
2 输入信号采集电路
电液伺服阀依靠电流信号进行控制,控制电流范围为4~40 mA,对应输出压力为0~20 MPa.ATmega16有8路10位的ADC,采集电压的范围为0~5 V.因此需要将控制电流信号进行调理供单片机A/D口进行采集。
输入信号采集电路主要由I V 转换电路和A/D 采集电路组成,实现将4~40 mA电流转换为可供单片机采集的0~5 V电压。电路如图2所示

输入电流信号4~40 mA 经过精密电阻R21 采集转换为0.1~1 V电压信号。R16 ,R22 ,R23 与放大器LM324构成同相比例放大电路。放大倍数计算公式为:
放大电路将电压信号放大为0.5~5 V.实际测试结果见表1
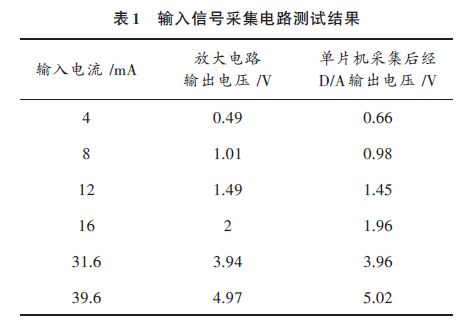
实测数据满足设计要求。注意表1 中第一行单片机采集后经D/A输出电压为0.66 V,与放大电路输出电压0.49 V有一定误差。实际在输入电流为0 mA时,D/A也会输出0.66 V 电压。这是因为电路中二极管D11 的静态压降影响。
3 电流信号输出电路
电流信号输出电路包括D/A 输出电路和V I 转换电路。
D/A 输出电路使用AD558 芯片实现,单片机控制AD558输出0~10 V电压。后级V I 电路将0~10 V电压转换为可达4~40 mA范围的电流信号以驱动电液伺服阀。
3.1 D/A输出电路D/A的选择需要考虑其精度、量程范围以及转换建立时间等参数,同时还要注意使用的方便性。AD558是一款具有高转换速度以及简单方便的控制接口的电压输出型D/A转换器。
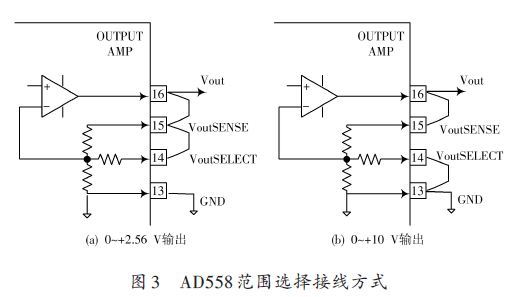
AD558的主要性能指标如下:8位并行数字量输入宽度;两种电压的输出范围,分别为0~10 V和0~2.56 V;相对精度±(1 2 )LSB;高速1 μs输出转换建立时间;单一电源供电,电源电压的范围4.5~16.5 V;内部具有基准电压源,不用外接基准源;内部集成有数据输入锁存器;低功耗,75 mW.
AD558的两种输出选择依赖于简单的外部接线方式,如图3所示
反馈控制器D/A输出电路如图4所示
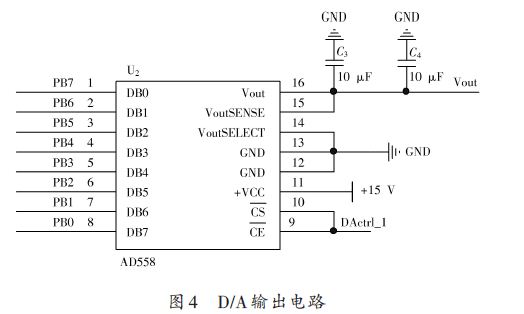
实际测试效果见表1中D/A输出。
3.2 V I 转换电路
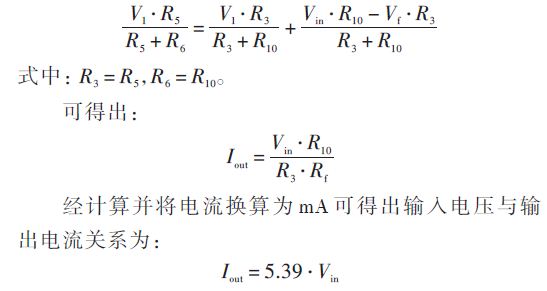
V I 转换电路将D/A 输出的电压信号转换为可达4~40 mA范围的电流信号,并且输出电流与输入电压满足线性关系。
在设计V I 转换电路时,考虑其带载能力,使其在带有一定负载时能稳定精确输出一定的电流信号而不受负载大小的影响。本文设计V I 转换电路带载等效范围为0~200 Ω。电路如图5所示。
电阻R7,R8,R9 并联构成反馈电阻记为Rf.输出电流Iout 流过Rf 产生反馈电压Vf.经过电路分析可得:
实际V I 电路测试结果见表2.

实测数据满足设计要求。电路中Q1、Q2接成达林顿管形式以增强三极管驱动能力。二极管D4防止在控制器故障被切除时伺服阀电流倒流入控制器。
4 故障切换电路
当系统发生故障时,系统需要切除控制器,不对输入电流做调节使其直接输入伺服阀。在此选用模拟电路切换开关MAX4660来实现。
MAX4660可作为单输入双输出选择或者双输入单输出选择的电流型CMOS开关芯片。切换速度极快,控制简单。具体参数为±15 V 供电;25 Ω的低开启电阻;1.5 Ω的最大导通电阻;150 mA持续电流;200 mA最大峰值电流;低功耗,3 mW.
控制逻辑如图6所示。故障切换电路如图7所示。
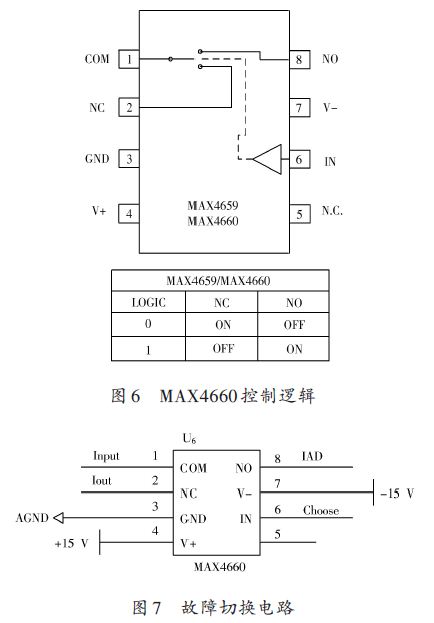
Input 为外部电流信号,作为单一输入端。Iout 和IAD 作为两个选择输出端。IAD 连接系统输入信号采集电路,Iout连接伺服阀。
当系统正常工作时,单片机给芯片6 引脚高电平,则Input与IAD接通,使单片机可以采集到输入电流并进行控制调节。当系统故障时,单片机给芯片6引脚低电平,则Input与Iout接通,使输入电流直接流入伺服阀。
5 系统控制算法
控制器采用传统的增量式数字PID控制算法,并对其作出一定的改进以改善其性能,方便参数整定。
传统增量式PID控制算法为:
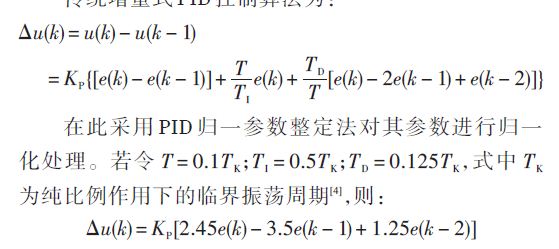
这样,对多个参数的整定调节问题简化成了对一个参数KP 的整定。控制流程如
ATmega16电液伺服阀控制器设 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)