基于80C196KC的软开关型脉冲MIG焊机的研究
摘要:根据脉冲MIG(Metal Inert Gas)焊工艺特点,设计了基于80C196KC控制的软开关型脉冲MIG焊机。采用单片机80C196KC作为控制系统的核心,主电路采用软开关式全桥逆变结构,功率开关器件为绝缘栅双极晶体管(IGBT),逆变频率为20kHz。采用PI算法实现恒流外特性,脉冲MIG焊接电源获得了电流频率、电流幅值、峰值基值导通比均可以独立调节的波形。试验表明脉冲MIG焊接电源控制系统运行稳定、可靠。
关键词:焊机;软开关;逆变;比例积分控制
1 引言
脉冲MIG焊以其在较大电流调节范围内均能够实现射滴过渡、轴向性好,适用于全位置焊接、热输入量方便可调以及焊接质量好等优点,受到国内外广大焊接工作者的关注。软开关技术采用谐振变流技术,其特点是功率器件在零电压和零电流条件下自然开通和关断。它从本质上克服了硬开关型弧焊电源的缺点,在较大程度上解决了功率开关损耗过大的问题。根据脉冲MIG工艺要求,设计了基于80C196KC控制的软开关型脉冲MIG焊机,峰值、基值电流调节范围为20~500 A,输出空载电压70 V,熔滴过渡方式为射滴过渡,焊接参数独立可调。
2 总体设计
软开关型脉冲MIG焊接电源系统整体结构如图1所示,由主电路、控制电路、驱动电路3个主要部分组成。系统采用目前较为常用的AC/ DC/AC/DC的逆变模式,脉冲开关信号来自单片机给出的控制指令,经驱动和放大后,为功率开关管提供固定频率为20 kHz的高频脉冲开关信号。在峰值电流期间,采样实际输出的峰值电流,经A/D转换后送入单片机与给定的峰值电流进行比较,单片机根据两者间偏差进行离散PI运算,得到1个控制参量,利用该控制参量实时调整20 kHz高频控制脉冲的宽度,使输出峰值电流与给定峰值电流相等;在基值电流期间,采用同样的方法,使输出基值电流与给定基值电流相等。

3 电源主电路设计
3.1 主电路工作原理
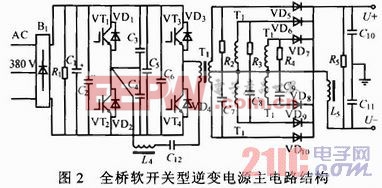
全桥软开关型逆变电源主电路结构如图2所示,主要分为:抗共模滤波、三相整流滤波、全桥逆变、功率变换和输出整流滤波5部分。
3.2 全桥软开关的工作原理
逆变电路采用软开关全桥逆变电路,由4个IGBT开关管(VT1~VT4),4个反并联二极管(VD1~VD4和外加IGBT吸收电容C3,C4组成,L4为谐振电感,C12为阻断电容。其控制原理与常规移相PWM控制原理相同,在大范围内也是PWM控制。IGBT驱动波形如图3所示。
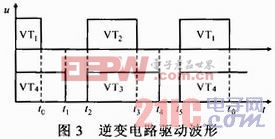
在t0时刻前,VT1,VT4两个IGBT导通,此时电流由A流向B,在t0时刻,VT1提前关断,此时电容C3,C4开始充放电,此时VT2的管压降迅速降低,由于C3,C4容量极小,故在很短的时间内(t2时刻到来前),VT2的管压降降为零,与其并联的逆导二极管VD2导通,此时电流流向为C4→L4→C12→T1→VT4,由于初级电流衰减,流过VD2的电流也迅速降为零,饱和电感L4阻断电流反向增加,同时阻断电容C12上的电压迅速升高,使初级电流保持为零。故在t1时刻,滞后臂上的VT4是在零电流状态下关断的;在t2时刻,VT2在零电压、零电流状态下导通。同理,在t3时刻,VT2提前关断,C3,C4又一次开始充放电,此时电流流向是VT3→T1→C12→L4→C4,在极短的时间内C4充电完成,其电压与前端的正电压相等,此时L4再次反方向的产生阻断电流,阻断电容此时反方向充电,产生反方向高压来阻止初级电流,故在t4时刻,滞后臂上的VT3在零电流状态下关断;在t5时刻,VT1在零电压、零电流状态下导通。
综上所述,超前臂实现零电流零电压开关(ZVZCS),滞后臂实现零电流开关,从而整个软开关逆变电路实现了ZVZCS。
4 电源控制系统设计
4.1 控制系统工作原理
在单片机闭环控制系统中,采用高性能的MCS-96系列单片机80C196KC作为电源控制系统核心,通过编程实现焊接过程控制、电流电压采样、A/D转换、PI运算、参数预置等功能。整个系统采用闭环负反馈控制,逆变采用PWM方式控制输出电流的大小,控制量经由MAX530组成的D/A转换电路后送到脉宽调制芯片UC3846,输出自带死区的两路PWM驱动信号,经过脉冲变压器的隔离驱动IGBT,输出恒流外特性。
4.2 IGBT驱动波形
图4为实测IGBT驱动波形,其中图4a为同一桥臂VT1,VT2上的驱动波形ugVT1,ugVT2,由图可知,两路驱动波形相位相反,脉宽相等,与预期的目标相同。图4b为同一导通回路VT1,VT4上的驱动波形ugVT1,ugVT4,即ugVT4一直保持最大脉宽,通过控制ugVT1脉宽来实现PWM调节。图4c为VT2,VT3上的驱动波形ugVT2,ugVT3。图4d为VT3,VT4上的驱动波形ugVT3,ugVT4。由图可见,ugVT3,ugVT4一直保持最大脉宽,只有ugVT1,ugVT2的脉冲宽度是跟随PI计算后的给定值而变化的,符合所设计的软开关主电路要求。
焊机 研究 MIG 脉冲 80C196KC 开关 基于 相关文章:
- 一种基于ARM的电子束焊机灯丝电源方案实现(01-15)
- 逆变电焊机的原理及其特点优势(12-13)
- 探讨逆变焊机IGBT炸管的原因及保护措施(12-04)
- 等离子(水介质)切焊机逆变电路的研制(08-27)
- 使逆变焊机高效节能的电源设计方案(08-02)
- 电焊机之IGBT系列焊机工作原理(03-25)