基于PLC的碟式太阳能跟踪控制系统设计
如何提高太阳能的利用率一直是国内外学者的研究热点[1-5]。太阳能跟踪系统使集热器装置始终保持与太阳光垂直,就可以在有限的使用面积内收集更多的太阳能,精确地跟踪太阳,可以大大提高集热器的接收率,进而提高太阳能的利用率。
目前,太阳能跟踪方法有光电跟踪和视日运动轨迹跟踪两大类[6-8]。参考文献[9]提出了基于PLC的单轴跟踪系统,采用光敏电阻光强比较法,利用光敏电阻在光照时阻值发生变化的原理来控制电机的转动,从而带动集热器跟踪太阳,但该跟踪方法受天气影响大,无法在阴雨天气正常工作,而且该跟踪系统采用单轴跟踪,只能在一个方位上对太阳进行跟踪。参考文献[10]介绍了基于二维太阳跟踪装置的控制系统,该系统采用视日运动轨迹跟踪方法计算出太阳高度角和方位角,进而通过PC机控制步进电机,从而带动集热器实现对太阳的跟踪。该方法成本低,但是采用视日运动轨迹跟踪存在累计误差,而且自身不能消除。此外,以上光电跟踪和视日运动轨迹跟踪中没有设计时间显示调整模块,无法显示实时时间和对时间进行调整。
鉴于此,本文提出了一种基于PLC的碟式太阳能热发电的跟踪控制系统的设计方案——混合跟踪方法,当太阳辐射光线达到一定阈值时,首先通过视日运动轨迹跟踪,然后采用光电传感器跟踪校正,同时本系统中还设计了时间显示调整模块,能够显示实时时间,同时也可以对时间进行实时调整,并设计了伺服驱动器及电机与PLC的连接电路。
1 跟踪系统的设计与实现
1.1 系统的总体结构
跟踪控制系统由传感器、可编程控制器(PLC)、数码管显示器、双轴跟踪装置组成。
其中双轴跟踪装置包括方位角调节机构和高度角调节机构。方位角调节机构主要由电机、行星减速器、一级蜗轮蜗杆、回转轴承组成;高度角调节机构主要由电机、行星减速器、螺旋升降机组成。当系统启动后,由控制器控制电机转动,通过减速装置从而驱动集热器跟踪太阳,实现对太阳高度角和方位角两方位的跟踪。跟踪系统的组成结构如图1所示。

1.3 光电传感器跟踪模块
本系统采用4个光敏电阻作为传感器来检测天空光线的变化,跟踪太阳的位置,进行误差校正。4个完全相同的光敏电阻置于一个高壁圆筒内,均匀分布在东南西北4个方位处,接收来自不同角度的入射光。当东西方位或南北方位的两个光敏电阻感受到的光强差值小于某个限定值时,PLC不发出让电机动作的信号;当光强差值超过一定范围时,PLC发出信号控制电机转动。如图2所示。其中CDS1和CDS2两个光敏电阻用于检测东西方向光线变化,调整太阳能集热器东西方向角,即方位角;CDS3和CDS4两个光敏电阻则用于调整太阳能集热器南北方向角,即高度角。采样不同位置光敏电阻上的模拟信号,经过运放及相应保护电路,然后通过A/D转换之后将信号输送到PLC进行数据比较程序,最终从PLC发出相应信号驱动电机动作。PLC采样输入端口选择X4、X5、X6、X7端口。图3为采样光敏电阻CDS1电压、进入PLC端口X4的采样电路,其他三路原理相同。


由于本系统中需要对时间进行调整,设计了按键电路,设置了2个按键S1、S2。S1用来调整时,调整范围是0~23,每按一次键时加1,可以在0~23之间循环调整。S2用来调整分,调整范围是0~59,每按一次键时加1,可以在0~59之间循环调整。
1.5 执行机构
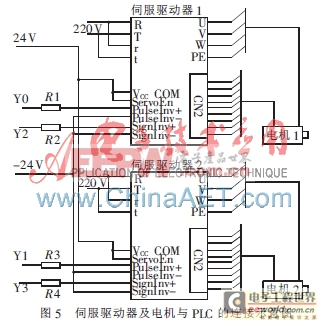
执行机构主要包括伺服驱动器、伺服电机和双轴跟踪装置,其中双轴跟踪装置有高度角运动装置和方位角运动装置。伺服驱动器接收控制器的输出脉冲,根据输出脉冲的个数和脉冲频率来决定伺服电机应转动的角度以及伺服电机的转速,从而通过电机来驱动双轴跟踪装置调节太阳能聚光器在方位角方向的偏差和高度角方向的偏差,使太阳能聚光器始终与太阳光线垂直。图5为伺服驱动器及电机与PLC的连接电路示意图。
2 跟踪控制系统的软件设计
系统的控制作用主要由控制器PLC来完成,主要完成两个任务:(1)计算太阳的运行轨迹,求出太阳的角度差,发出初步调整信号;(2)处理传感器偏差信号,发出误差校正信号。其主程序流程图如图6所示。
系统在刚启动时,跟踪装置处于跟踪的起始位置,当系统开机启动、程序初始化设备和相关参数后,首先是读取时间,如果在日出前或日落后,则系统等一段时间后再读取时间,当读取的时间在日出和日落之间,系统通过辐射表采集辐射强度,以判断是否阴天、有云或其他遮盖,如果采集到的辐射小于系统设定的阈值,则系统等待一定时间后再继续采集;当采集到的辐射大于系统的设定阈值,则系统通过读取的时间和当地的地理参数计算太阳的高度角和方位角,并将计算的结果与前一次的计算结果相减,得到角度差,然后根据角度差计算出PLC需要发出的脉冲数,再送给伺服驱动器,驱动电机转动,从而带动执行机构动作,完成初步跟踪。
- 基于AT89C52的励磁调节器的设计与实现(07-23)
- PLC系统与电源系统的整合应用(07-26)
- 可编程控制器与电源的整合应用(08-09)
- 恒流高压直流电源的自动控制及应用(08-30)
- ITPM在雷达发射机高压电源中的应用(09-15)
- 如何选择合适的变电站用直流电源屏(09-20)