新型半主动激光制导实物仿真系统设计与实现
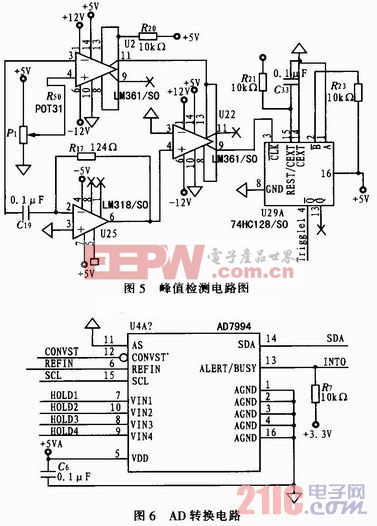
LM361为高速差动电压比较器,输出为TTL电平信号,是SE529/NE529的增强型。其传输速度快,具有通用的电源电压,有独立的选通端,具有延迟很小的两个互补TTL电平信号输出,输入失调电压小,在过驱动时转换速度小。1和6脚为±12 V电源输入端,3和4脚为模拟电压信号输入端,9和11脚为输出端,8和13脚为选通端。LM318为工作在闭环状态下的开环增益运算放大器。
图5中,1路信号P1与电位器分压得到的电压作为LM361的输入端,U21的输出端作为U22的选通信号。P1信号经过运放LM318后,作为U22的输入信号。单稳态触发器74HC123将U22输出的TTL电平信号进行峰值保持,其输出作为单片机的中断输入,进行AD转换。
ADC电路将峰值保持电路的输出信号进行模拟信号到数字信号的转换。系统选用ANALOG DEVICE的AD7994BRU-0作为AD转换芯片。AD7994BR U-0芯片拥有4通道,具有10和12位的数模转换,兼容I2C,16位引脚,最快采样周期为2μs。
3 应用程序设计
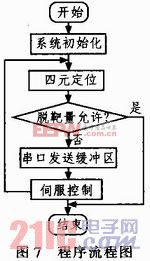
系统的单片机应用程序主要包括四元定位、脱靶量计算、串口通信等模块,采用C语言进行模块化编程。四元定位是程序的重要模块,基于四象限的和差电路结构,通过AD转换,将单片机采集到的数字信号,利用和差电路算法解算出目标的方位信息。将解算出的目标方位信息与四象限远点进行对比计算,计算出目标脱靶量。单片机通过MAX3232串口通信模块,将偏差量传送给伺服控制系统,完成对目标的跟踪。单片机程序流程如图7所示。
 4 结束语
4 结束语
文中简介了系统的工作原理,并对处理电路的关键电路进行详细的描述,根据实际的情况,通过选择合适的处理芯片,完成对探测器输出信号的放大、鉴别、保持和AD转换,最后通过单片机的CPU处理电路解算出误差,通过转台伺服控制机构完成对模拟激光源的稳定跟踪。电路设计合理,实际中进行了反复测试。实际应用结果表明,系统工作稳定,抗干扰能力强,性能良好。
系统 设计 实现 仿真 实物 主动 激光 制导 新型 相关文章:
- 控制系统中常见的几种地线详解(10-13)
- VxWorks操作系统的CompactPCI测试仿真系统(12-12)
- 基于VxWorks操作系统的CompactPCI仿真系统(12-12)
- 电源系统管理中数字可编程 DC/DC 转换器的精确度探讨(12-12)
- 工程师详解测控系统仿真与测控设备软件化技术(12-12)
- 一种新型自动抄表系统数据集中器的设计(12-09)