高精度无刷直流电机伺服控制系统的设计与仿真
摘要:为提高伺服系统中无刷直流电机的控制效果,设计了以DSP为核心的无刷直流电机控制系统方案。本控制系统的主要优势在于利用数字信号处理器的高速实时运算处理功能,易于实现各种高效的控制算法,很好地解决了伺服系统中PWM信号的生成、电动机速度反馈和电流反馈等问题。并结合模糊控制算法进行了仿真研究,达到无刷直流电机的高精度伺服控制的目的。
关键词:无刷直流电机;DSP;PWM控制;Sinmulink仿真
在伺服传动系统中,无刷直流电动机(BLDCM)是一种新型的无级变速电动机,其结构简单可靠、维护方便、运行效率高及惯量小和控制精度高等优点,广泛应用于伺服控制精密数控机床、加工中心、机器人等领域。随着BLDCM应用领域的推广,对系统的动静态性能、鲁捧性、控制精度等要求越来越高。
本文以三相四极无刷直流电动机为研究对象,结合PID控制和模糊控制各自的优势,设计了一套基于TI公司的C2000系列TMS320F2812 DSP为核心的全数字永磁无刷直流电动机的闭环调速系统,以期满足BLDCM伺服控制系统的高精度、快速性、稳定性和鲁捧性的要求。
1 总体方案设计
系统没计采用三相四极无刷直流电动机PWM控制方案,逆变桥的通电方式采用两两导通方式该系统主要由三相四极无刷直流电动机、控制器、电子开关电路和化置检测器四部分组成。其结构框图如图1所示。

功率驱动方式采用三相Y型全桥驱动电路,如图2所示。本系统实现的关键就是通过位置环、速度环和电流环三闭环结构最终实现位置的伺服控制。从闭环结构上看,位置环在最外面,是本系统的主环,电流调节环和速度调节环在里面,两者都是为位置环而服务,电流调节器和速度调节器采用PI调节器,位置调节器采用PID调节器,以TMS320F2812微控制器为控制核心,以功率MOSFET管构成逆变器。通过改变逆变器开关器件的PWM占空比来改变电机电楸端电压,以实现电机转速的调节。
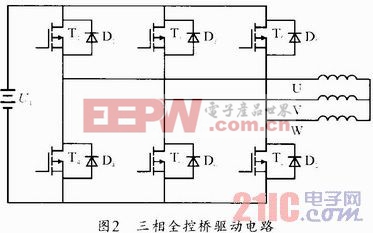
图3给出了基于TMS320F2812 DSP的无刷直流电机控制系统硬件结构框图。
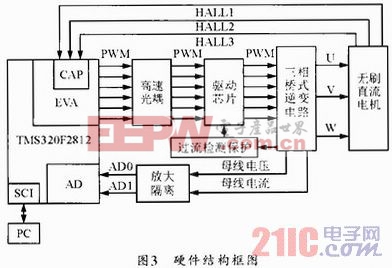
本系统主要由辅助电源、控制器及外围电路、电动机驱动电路、检测电路和系统保护电路等几部分组成。无刷直流电动机的渊速原理为:TMS320F2812控制器通过捕获单元捕捉无刷直流电动机转子位置传感器HALL1、HALL2、HALL3高速脉冲信号,检测转子转动位置,并根据转子的位置发出相应的指令改变PWM信号的当前值,进而改变直流电机驱动电路(三相桥式逆变电路IGBT)中功率管的导通顺序,实现电机转速和转动方向的控制。
下面重点介绍系统中的转子位置检测电路、相电流检测电路、驱动电路、系统保护电路等。
2.1 转子位置检测电路
本设计方案中,位置检测环节采用了3个位置间隔120°分布的霍尔传感器,由霍尔器件所输出的转子位置脉冲信号送到功率变换电路后,经处理后送入DSP的CAP单元,DSP通过读取霍尔元件的状态值,来确定转子的当前位置,再通过改变PWM的占空比改变MOSFET管的导通顺序,改变IGBT的导通顺序,实现电机的换相和电机转速的调节。
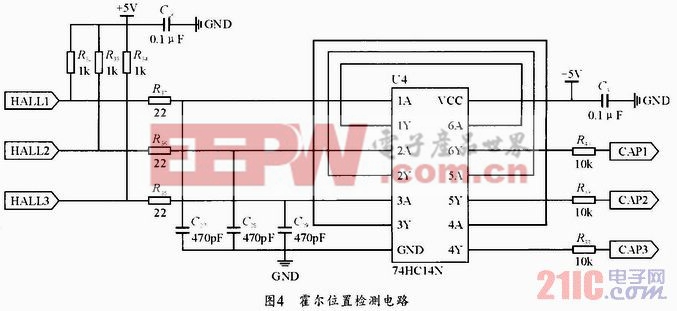
霍尔位置传感器输出的信号先由阻容滤波电路处理,然后冉经过六路施密特触发反相器SN74HC14N整形后送入DSP的CAP单元进行处理计算。由于霍尔位置传感器输出为5V电平信号,为了与DSP的3.3V电平相匹配,需要进行电平逻辑转换,在此通过施密特触发器输出端串联匹配电阻的方法来实现。三相霍尔位置检测电路如图4所示。
2.2 相电流检测电路
在对电路中电流信号进行检测时,由于霍尔元件输出的电流较小,故采用在直流侧母线中串采样小电阻的方法,先将电流信号转化为电压信号,然后再经过放大隔离处理后送入模数转换器A/D。其中光耦隔离器件选择的是6N137。电流检测电路图如图5所示。
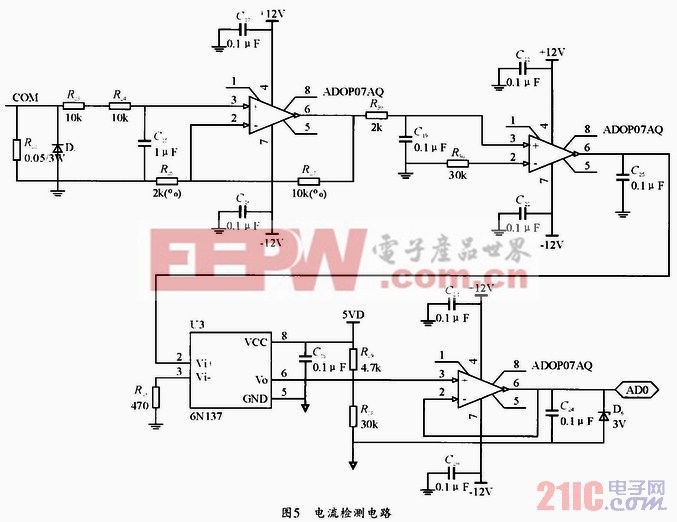
其中R22(0.05Ω/3W)为直流侧母线端的采样电阻,首先将电阻两端的压降信号经过阻容滤波电路滤波,然后经过运算放大器放大,以满足TMS320F2812中A/D转换单元的采样范围(0~3V)的要求。电路中采用了单路高精度双极性运算放大器OP07。图中的二极管D6起稳压保护作用,确保AD0的输入电压存0~3V的范围内,另外,通过光藕合器6N137将干扰路径切断,减小噪声的干扰。
2.3 驱动电路
驱动电路采用IR公司生产的高性能三相桥式逆变器驱动芯片IR2136,它只用一路驱动电源便可同时输出6路驱动信号,且IR2136拥有完善的保护功能,使整个电路更加简单可靠。
输入信号,利用它可方便地实现系统的各种保护功能。各路故障信号经过光耦隔离后送入到引脚,图8给出具体保护电路。例如:当有过压或过流现象时,IR2136的引脚FAULT会输出制动信号,拉低引脚输入电平,此时DSP内部定
- 3D IC设计打了死结?电源完整性分析僵局怎么破(09-21)
- 快速调试嵌入式MCU设计仿真的三大因素浅析(12-12)
- 访问电源参考设计库的众多理由(12-09)
- 开关电源设计中如何选用三极管和MOS管(12-09)
- 一款常见的车载逆变器设计电路图(12-09)
- 电子工程师必备:电源设计及电源测评指南(12-09)