飞轮电池提高离网型风力发电系统稳定性研究
本文对采用飞轮电池储能的离网型风力发电系统中飞轮储能系统稳态时的模型进行了分析,通过对飞轮电池进行快速、稳定的充放电控制,稳定了系统直流侧电压,增强了系统可靠性,从而实现离网型风力发电系统的稳定运行。
1 飞轮储能系统的结构和原理
图l所示是一种飞轮和电机为一个整体的飞轮储能系统[3]。

飞轮储能系统是一种机电能量转换与储能装置,它突破了化学电池的局限,用物理方法实现储能,其基本原理是在储能时,电能通过电力转换器变换后驱动电机运行,电机带动飞轮加速转动,飞轮以动能的形式把能量储存起来,从而完成电能到机械能转换的储存能量的过程,能量储存在高速旋转的飞轮体中;之后,电机维持一个恒定的转速,直到接收到一个能量释放的控制信号;在释能时,高速旋转的飞轮带动电机发电,从而完成机械能到电能转换的释放能量过程。由此,整个飞轮储能系统实现了电能的输入、储存和输出过程[4]。
2 系统结构和工作原理
采用飞轮储能系统作为调节单元的离网型风力发电系统的结构如图2所示。其中,风电机组主要由风轮机、永磁同步发电机等部分组成。储能单元为飞轮储能系统,它利用感应电机带动金属飞轮,将电能转化为机械能,实现能量的存储。
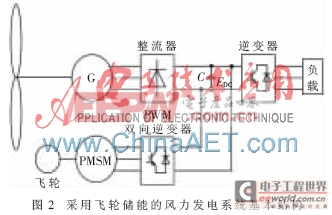
由于风力发电机发出的能量随风速的变化而变化,并且实际的负载也是随时变化的,所以直流总线上的电压会出现波动,从而造成系统不稳定。
在这个系统里,当风能不足或负载较大时,直流总线电压EDC将减小,飞轮储能系统里的感应电机作为发电机,将储存于飞轮中的机械能转换成电能补偿给整个系统;当风能充足或负载较小时,直流总线电压EDC将增大,飞轮储能系统里的感应电机作为电动机,将电网上多余的能量存储到飞轮储能系统里。这样,通过飞轮的不断释放和吸收能量达到维持直流侧电压EDC在预定范围内的目的[5]。
3 飞轮电池的充电控制
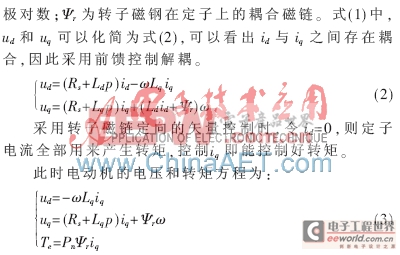
配备有飞轮储能电池的独立运行式风力发电系统,当风速变大或者负载减小时,系统直流侧电压EDC将上升,飞轮储能电池的电机运行于电动状态,将电能转换成机械能储存于飞轮中。此时PWM双向逆变器工作在逆变状态。为了满足飞轮电池充电的快速性、稳定性等要求,这里采用了电机转子磁链定向的矢量控制策略[6-7]。为此,建立永磁同步电动机的d-q轴数学模型如下: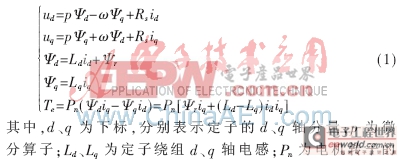
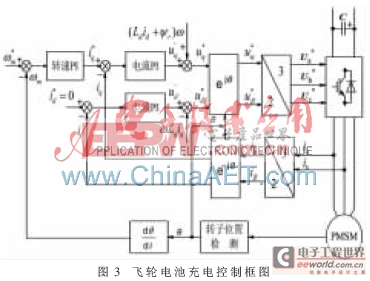
飞轮电池充电时,采用d-q轴的前馈解耦和id=0的矢量控制,如图3所示。该控制框图采用转速外环、电流内环的双闭环控制。当系统直流侧电压EDC上升时,飞轮电池充电,PWM变流器工作在逆变状态。直流电经过逆变器的变压变频后给飞轮电池的电动机供电,并且通过调节电动机转速来控制飞轮电池的充电电流大小。将电动机转速的给定信号与反馈信号进行比较,之后经过转速调节器,转速调节器的输出为电流调节器的输入。定子相电流的d-q轴分量和它们的反馈量进行比较,经过电流调节器的校正,电压解耦,得到d-q轴的电压控制量,再运用矢量反变换获得需加在电动机上的输出电压,然后再用SPWM调制技术得出对逆变器的驱动脉冲。id、iq的反馈量由电动机定子得到。通过电机转速也可知道飞轮电池的能量状态。abc三相电流经过坐标变换得到。坐标变换中的θ和电机转速可由转子位置检测单元得到。
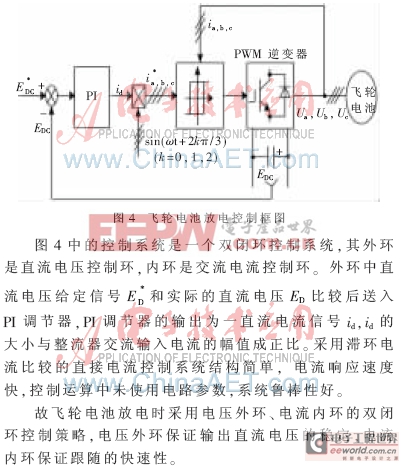
4 飞轮电池的放电控制
在配备有飞轮储能电池的离网型风力发电系统中,当风速变小或者突加负载时,系统直流侧电压EDC将下降,飞轮储能电池的电机运行于发电状态,将储存于飞轮中的机械能转换成电能补偿给系统。此时PWM双向逆变器工作在整流状态。永磁同步发电机发出的三相正弦交流电经过PWM整流之后得到稳定的直流电。根据是否选取瞬态输入交流电流作为反馈控制量,PWM 整流器控制分为间接电流控制和直接电流控制两种。间接电流控制基于系统的静态模型设计,其动态特性较差;直接电流控制由于动态响应快、控制精度高的优点,成为 PWM 整流器控制策略的主流。所以本系统采用直接电流控制,图4所示是本系统所采用的电流滞环比较方式的控制系统结构图。
5 系统的仿真结果及分析
采用Matlab/Simulink对系统进行仿真,其中风力发电系统的参数参照参考文献[8]和参考文献[9]。飞轮储能系统的仿真参数如下:电机参数R1=2.875 ?赘;L-M=8.5 mH;p=4;J=0.8×10-3 kg/m2。分别对风速突然增大和突然减小两种情况进行了仿真分析,给定直流母线电压为400 V,仿真结果如图5和图6所示。
- 基于风力发电的无线万能充电器(09-28)
- 风力并网逆变器滞环SVPWM控制策略的研究风力并网逆变器滞环SVPWM控制策略的研究(08-23)
- 用于风力发电的电压跌落发生器(11-30)
- 输出500W的风力发电机充电电路(04-08)
- 风力发电机对蓄电池的充电电路设计(04-08)
- 利用风力发电机的高效充电电路(04-08)