基于台达AFE2000的四象限变频控制
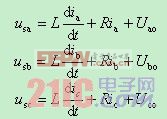
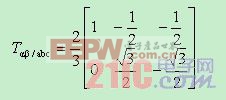
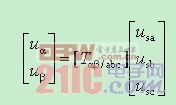
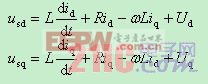
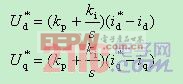
相位控制部分也可称为功率因数控制,实质为调节功率因数的大小,保证实现电流与电压的同相位。相位控制环通过检测相电流iR的基波相位,经低通滤波后得相位角φ,再与指令φ*比较,并经PI调节器后用于调节PWM调制的相位控制器角α,使系统工作在任意的功率因数角下。相位检测的精度对控制特性有很大影响,因此,要求有稳定工作的基波电流相位检测电路。LPF的输出信号电平决定了α的控制,一般要附加限幅电路,使α限制在±π/4之内。 图6 控制系统框图 (2) 电压控制 PWM整流器的输出直流电压基本上取决于交流线电压和调制深度M,并与调制深度M基本成反比关系,因此,可以与功率因数分开,独立控制直流电压。从控制特性上考虑,当直流电压需要稳定控制时,必须用到电压控制环,由于直流电压与M成反比关系,因此,控制电路对电压控制信号最好具有线性关系。而且,闭环控制时,最好加调制深度限幅电路,使得调制深度不要小于MC。 2.3有功无功分解控制 了解到三相PWM整流器的控制原理后,在此基础上进行算法的深入研究。通过控制原理的了解,我们可以发现,PWM整流器的控制目标是输入电流和输出电压,而输入电流的控制是整流器控制的关键。输入电流的控制目标是使电流波形为正弦波且与输入电压同相位。 在PWM整流器控制方法上,将三相交流电流变换成d-q坐标系,从而进行对电流d、q的分量单独控制,这样有功功率和无功功率的单独调节将会十分简便。 通过图1可列出PWM整流器的三相控制电压方程: (1) 采用空间坐标变换方法,将上述方程变换到两相静止坐标中,其变换阵为: (2) 变换方程为: (3) 再进一步由α-β坐标系转换为d-q坐标系,变换阵为: (4) 变换方程为: (5) 经过以上变换后,在同步旋转坐标系下PWM整流器方程为: (6) 上式中,usd与usq为d-q坐标系下的电源电压,ud和uq为d-q坐标系下的桥臂中点控制电压。再回到三相空间静止坐标下,取三相输入电压usa、usb和usc为: (7) 则经过同样坐标变换,在d-q同步坐标系下有: (8) 将式(8)代入式(6)得: (9) 由式(9)可见,id,iq之间存在耦合,通常有电压前馈解耦控制和电流反馈解耦控制两种,前者虽是一种完全线性化的解耦控制方案,但实时性问题实现起来效果并不好。本文采用电流反馈解耦控制方式实施方便,控制电路简单。 实际应用中,当电压环的采样频率远高于电网电压的频率时,在方程中造成互耦的ωLid和ωLiq对电流调节器性能影响小,忽略这个因素,这样将电流控制指令 与反馈电流id,iq比较,其误差经过PI调节得到电压给定信号,即: (10) 将式(1)至式(10)的过程整合起来,得到控制框图如图7所示: 图7 PWM整流器矢量变换控制图 3 台达AFE2000能量回馈单元 AFE2000是台达IABU提出的一款与变频器匹配的能量回馈装置,AFE2000采用有功无功电流解耦控制,通过CLARK-PARK变换达到有功和无功的解耦控制,从而实现功率因数调整和能量回馈控制。其外观图如图8所示。 图8 AFE-2000外观图 AFE2000将回生能量通过IGBT逆向回馈至电网,改善了传统的热电阻消耗的热能浪费、维修困难等缺点。两种模式的状况对比如图9所示: 图9 回生能量消耗方式 通过图9可知,能量回馈也分为两种方式,一种为只进行能量回馈,但是无法实现功率因数的改善;另一种为进行能量回馈,同时也进行功率因数的改善。AFE2000属于最高层,即可以进行能量回馈,同时也能实现功率因数的改善,且控制参数简便,容易调整。 4 结语 三相PWM整流器因其所具备的功率因数改善和能量回馈等功能,越来越受到广大工程应用人员的青睐。台达AFE2000正是基于三相PWM整流器开发的能量回馈单元,其控制模式简单,功能强大,能同时进行功率因数与DCBUS电压的双重调整,将其与变频器连接后,真正实现了绿色调频的理念,抛弃传统的能耗很高的热能消耗方式,将回生能量充分利用,符合节能、环保、爱地球的理念。■ 更多好文:21ic电源 






- 变频器和变频电源的工作原理及区别介绍(12-09)
- 基于DDS的变频精密脉冲型电源系统设计(12-09)
- 简述交流变频电源基本知识与选择参考(12-08)
- 变频器应用时的12个技巧(12-08)
- 浅析变频电源与变频器的区别(12-08)
- 变频电源的定期维护要点及其注意事项(12-08)