基于最大功率的VSI泄放电阻制动技术及应用
摘要:电阻制动由于简单实用且成本低,在中小型功率等级电压源逆变器(VSI)电路的直流母线泵升电压控制中广泛使用。提出一种新的制动控制方法,该方法充分考虑了直流母线电压限制的需求,同时也考虑了制动电阻的最大功率和冲击时间限制,通过电压因子通道和功率因子通道的联合设计,实现了制动电阻的优化泄放控制。通过基于TMS320F28335的浮点DSP控制平台,用永磁同步电机(PMSM)的弱磁失控等实验验证了该制动方法的有效性和实用性。
关键词:逆变器;制动电阻;弱磁失控
1 引言
基于VSI的交流电机驱动控制系统在现代电气传动领域得到广泛应用。在电机驱动控制应用中,当电机处于减速制动状态时,VSI的直流母线电压会升高,若不加以控制,则可能超过直流母线电容或功率器件的最大耐压,导致硬件损毁。因此,直流母线泵生电压的抑制对于VSI的可靠工作非常重要。目前,较先进但昂贵的方法是采用PWM整流器方式为VSI提供直流方式供电,当电机工作于制动回馈状态时,直流母线电压将升高,PWM整流器自动将能量回馈至电网。但由于其成本较高,仅适合于对成本不敏感的高端应用场合。在中低端的驱动控制领域。还有很多驱动器是基于整流桥方式,可通过降低转矩电流变化率来降低直流母线的泵升电压,或通过直流母线电压限制闭环控制来自适应降低转矩电流的方案。这两种方案虽然可限制直流母线电压,但却牺牲了转矩的动态控制性能,而且对于PMSM在高速弱磁状态下发生失控,反电动势瞬时反弹的场合也并不适用。另外一种在中小功率逆变器驱动中简单常见的方案是安装制动电阻。目前大多数产品的控制方法主要是简单的硬件滞环比较控制方式,当电压高于设定泄放导通电压时,通过制动电阻泄放,当低于设定泄放关闭电压时,停止泄放。该控制方法过于简单,改变硬件参数复杂,容易发生故障并烧坏制动电阻。
针对使用制动电阻的实际泄放需求,提出一种新的基于软件方案的制动电阻控制策略。该控制技术充分考虑了制动电阻的额定功率、使用率、电阻值及最大允许冲击时间。通过软件来配置工作参数,该技术可有效地实现优化的直流母线电压泄放控制,并在基于TMS320F28335的32位浮点DSP电机驱动控制系统中得到了验证和应用。
2 制动优化控制技术原理
在此根据制动需求,首先考虑制动电阻参数和工作参数,并在此基础上提出一种基于最大功率和冲击时间限制的优化泄放技术。
2.1 制动泄放控制相关参数
为控制直流母线电压的泵升,将制动电阻本体和制动泄放工作点两个方面的参数作为系统控制参数输入。制动电阻本体参数包括制动电阻阻值、额定功率以及短时抗冲击允许时间。另外,在实际使用中,为提高可靠性,制动电阻的使用需要考虑降额率,以避免制动电阻过热而损坏。制动泄放工作点参数包括直流母线电压启动泄放工作点电压和电压滞环值。当直流母线电压大于泄放工作点电压与电压滞环值之和时,电压泄放电路工作;当直流母线电压小于泄放工作点电压与电压滞环值之差时,电压泄放电路停止工作。通过设置电压滞环,避免制动电路在泻放工作点反复跳转。
2.2 制动电阻优化泄放控制技术
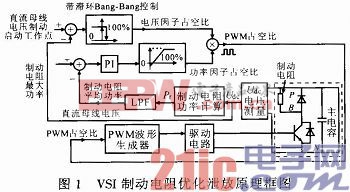
制动电阻优化泄放控制技术的核心思想是充分利用制动电阻的最大泄放能力,快速、安全地控制直流母线电压泵升。如图1所示,直流母线电压可通过电压传感器测量得到,结合当前制动PWM占空比和制动电阻阻值信息,可计算得到制动电阻的瞬时功率,通过低通平滑处理,可得到制动电阻的平均功率,作为功率反馈,与设定的制动电阻允许最大功率比较。当平均功率小于最大功率,按Bang-Bang方式控制制动,这样允许在短时间内进行大电流放电处理。当制动反馈功率达到设定的最大功率时,自动调节以占空比方式实施制动泄放。由于同时考虑直流母线泵升电压和制动电阻功率的限制,实现了制动泄放的优化控制。
2.2.1 制动电阻的功率计算
设制动电阻为R,PWM制动占空比D∈[0,1],直流母线电压测量值为Udc,则R消耗的瞬时功率P=(UdcD)2/R。R一般具有抗冲击能力,允许短时过载运行。利用抗冲击时间,将P通过时间常数为τ的一阶低通滤波器(LPF),可近似认为该LPF的输出为R的平均功率。一阶LPF的传递函数为:x=u/(τs+1),τ一般可选择为1/3的制动电阻允许冲击时间。
2.2.2 电压因子通道的设计
电压因子通道采用滞环Bang-Bang控制,以便得到灵敏的响应速度。电压因子占空比初始输出为零。当Udc大于直流母线电压启动泄放工作点电压与制动时直流母线电压滞环值之和时,电压因子占空比输出为1;当Udc小于直流母线电压启动泄放工作点电压与制动时直流母线电压滞环值之差时,电压因子占空比输出为零;其余情况则保持上一拍的输出状态。电压因子通道输出的响应可以在数字控制器的一拍内完成。
2.2.3 功率因子通道的设计
以R允许最大功率为参考值,以R的当前平均功率为反馈值,经PI调节器及限幅处理得到功率因子占空比。PI调节器的设计如下:G(s)=Kp·[1+1/(TIs)],其中,Kp为比例增益,TI为积分时间常数。在电阻制动动作发生前,工作占空比为零,R的当前平均功率为零,PI调节器处于饱和状态,功率因子占空比输出最大值100%。一旦直流母线上泵升电压超过设定值,在R允许的冲击时间内,R的平均功率将缓慢上升,在没有超过允许的最大制动电阻功率前,功率因子占空比输出保持最大值100%,从而可以在制动初期以连续方式实现泄放,快速降低直流母线上泵升电压。如果泵升电压还没有完全降低下来,但已超过了R允许的冲击时间,这时则不允许连续制动,将通过PI调节器自动进入占空比方式制动。
在占空比方式下,R上的平均消耗功率将控制在允许最大功率内,此时按最大功率设定值自动计算占空比最大值。通过最大占空比限制,同时保证了制动效果和R的安全。当制动成功,直流母线上泵升电压降低到目标电压以下时,制动占空比为零,R的平均功率将缓慢归零。
2.2.4 制动占空比及其PWM控制实现
制动电路的工作占空比可由电压因子占空比与功率因子占空比的乘积得到,从而兼顾了Udc限制需求和R功率限制需求,实现了优化制动泄放效果。制动电路的工作占空比范围为[0,1],可由数字电路的三角波发生器和数字比较器构成PWM单元,控制占空比的生成,此功能在TM S320F28335型DSP Epwm外设上很容易实现。
3 实验结果与应用
基于最大功率的泄放电阻制动技术已经在32位浮点TMS320F28335型DSP驱动控制系统中得到了实验验证。实验所用的4对极PMSM的各项参数如下所示:额定输出功率5.5 kW,额定转速1 500 r·min-1,额定转矩35 N·m,电势系数1.026 V·s/rad,转矩系数2.18 N·m/A,相绕组电阻0.35 Ω,Ld=7.3 mH,Lq=7.8 mH。制动电阻平均功率计算的一阶LPF时间常数τ为0.33倍电阻允许冲击时间。
Udc的测量通过系统的DAC输出监控,R流过的电流IR通过电流钳接示波器测量。R=32 Ω,制动电阻功率1 000 kW,R的使用降额率设置为50%,R的短时抗冲击允许时间设置为3 s;功率因子通道PI调节器的参数:Kp=0.8,TI=0.3;电压滞环宽度设置为5 V。实验波形如图2所示。
- 实现智能太阳能管理的微型逆变器应运而生(05-06)
- 只需少量器件的廉价自动复位断路器(07-31)
- 即将普及的碳化硅器件(10-19)
- IR2110驱动电路的优化设计(03-15)
- 关键电源及LED照明应用的最新高能效规范要求、设计挑战及解决方案(12-07)
- 基于FPGA的三相PWM发生器(06-23)