光-氢转换系统电力电子模块研究

根据稳态运行时的参数及电路参数,在控制对象中,Us=28 V,Req=0.14 Ω,L=40 μH,C=20 μF。电流反馈网络采用开环霍尔传感器ACS714加低通滤波器,可求得反馈网络传递函数为:
H(s)=K/(R1C1s+1) (3)
式中:K=0.033;R1=100 Ω;C1=0.1μF。
控制器采用单零点PI算法,则:
C(s)=(Kps+Ki)/s (4)
由上述分析可得闭环传递函数为:
φ(s)=C(s)G(s)H(s) (5)
用Matlab可得在PI调节器补偿后开环传递函数频率响应曲线,如图5所示。可见,当Kp=3,Ki=3 000时,交越频率为10 kHz,为开关频率的1/5,相位裕量为59.9°,能满足系统稳态与动态需求。

电力电子模块采用dsPIC33FJ64GS606型数字信号控制器来进行底层电流控制及本地功率管理(光伏功率追踪)。器件外设为带有丰富功能的PWM外设,利用边沿对齐互补的PWM模式,通过各路PWM的非独立式移相寄存器PHASE来设定各路PWM的相移,生成两路50 kHz的PWM相位相差180°;用控制器A/D外设,以10 kHz采样率10位的精度进行两路电流采样并反馈回控制回路;将控制器以零阶保持的方式进行离散化,可得到用于数字控制器实现的形式。
6 实验结果与分析
单模块供电的氢电解系统由于采用多相高频化,主电路输出与输入端仅采用了低容值固态陶瓷电容进行滤波。实验电解槽额定输入13 V/30 A,单块光伏电池板在当前测试光照下的开路电压为21 V,短路电流为6 A。
图6a,b示出给定值下系统的稳态运行波形,图6a为相对相位为180°的双路PWM和双路电流波形;图6b为不同时间尺度下的稳态PWM与双
路电流波形,实验波形表明在稳态闭环运行下,可保证PWM相对相位与电流稳态值跟踪。
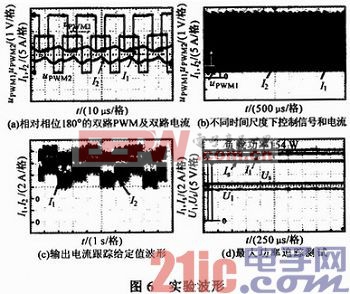
研究中对光伏的最大功率追踪是通过调节负载电流实现的,为验证电力电子模块调节输出电流的能力,将变化的电流给定值定时赋给两个电流控制环,图6c示出两个通道的输出电流I1和I2随给定值变化的实测波形,表明电流控制回路可较好地跟踪电流给定。图6d为单模块带两块光伏板并联时最大功率追踪的稳态波形,即电解槽端电压U1、电流I1、光伏端电压Us和电流Is波形;通过光照计的校准与降压变换器的效率测量,可知稳态波形处于电池板的最大功率点处。
7 结论
此处提出了基于分布式供电的制氢系统架构,并对其中关键的光伏模块化供电技术进行深入探讨,包括氢电解槽小信号建模,双相降压变换器建模,底层数字控制系统设计,以及光伏最大功率追踪的实现。实验结果表明,单电力电子模块的性能达到了预期效果。未来工作将专注于使用多智能体技术协调各电力电子模块工作。
- 数字控制器提高DC/DC效率的策略分析(12-09)
- 巧妙提升数字控制电源性能的利器—MOSFET驱动器(12-09)
- 详述电源系统中数字控制器的应用设计(12-08)
- 解析电源系统中数字控制器的应用设计(12-08)
- 如何提升数字控制电源性能?MOSFET驱动器?(12-07)
- 数字控制技术在功率密度和电源管理上的应用(12-07)