滞流控制实现LED恒流驱动
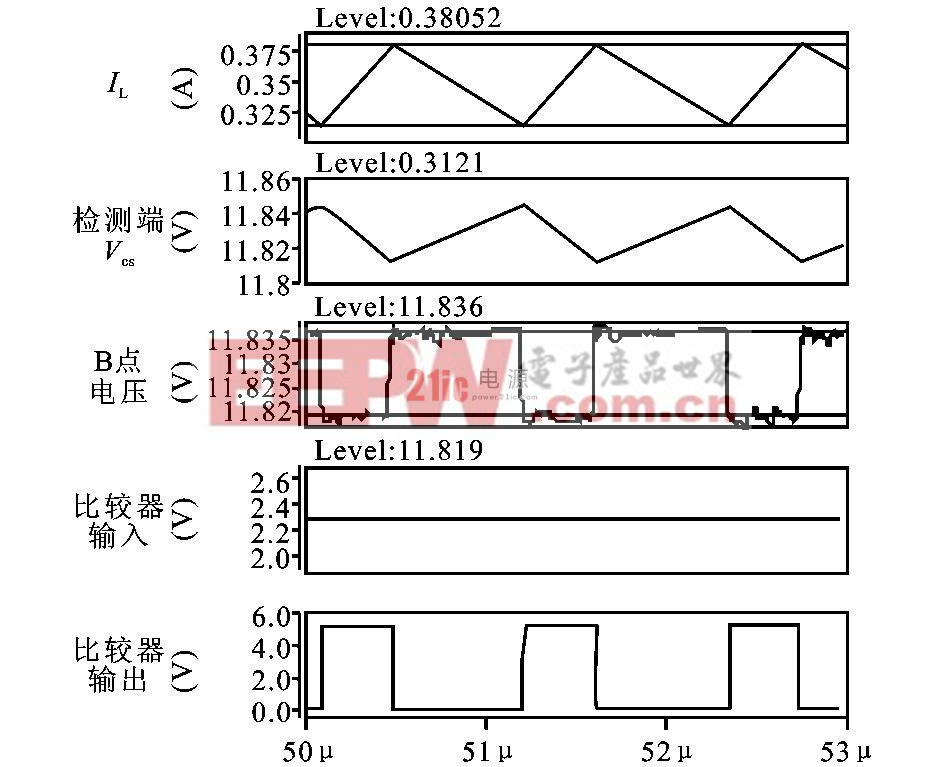
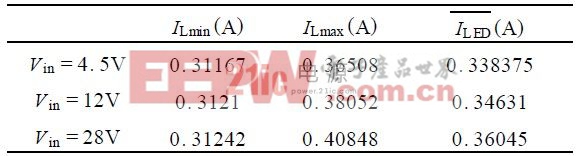
带隙电压基准上。 由M7 - M8 、M6 - M9 组成的级联电流镜将偏置电流I1 镜像到M8 - M9 - R5 所在支路,所以Compara2tor 模块的一个输入端电压V n 保持一定,另一输入端电压V p 将跟随检测电压V cs变化。 当比较器输出V out为高电平(开关管导通) 时,B 点电压为VBL 即下限阈值检测电压V CSMIN ,当V cs下降到此阈值时,由M6~M11 组成的对称电路结构使流过R5 、R6的电流相等,此时V n = V p . 若V cs V CSMIN ,即V p V n ,比较器翻转,输出V out为低电平。 当V out变至低电平后,M2 截止,B 点电压将变为V BH , V BH即是上限阈值电压V CSMAX ,流过L ED 的平均驱动电流是 由B 点平均电压设定: 滞环电流范围: 上式决定了驱动电流的纹波大小。 3 仿真结果分析 文中电路采用0. 5μm 5V/ 18V/ 40V CDMOS工艺,用Hspice Z - 2007. 03 进行仿真。 在脉冲宽度为200μs、周期为300μs 的DIM 信号和V in = 12V(典型值) 的共同作用下,仿真结果如图6 所示。 图6 Vin = 12V 时的电路仿真 分别在V in = 2. 5V , V in = 28V 的情况下,再次对L ED 驱动电流进行仿真,三次仿真数据结果分别如表1 所示。 表1 三种输入电压情况下的驱动电流 在V in = 12V 时,对LED 驱动电流进行温度特性仿真,三次仿真波形结果分别如表2 所示。 可以看出,芯片的温度特性较好。 表2 Vin = 12V 情况下三种环境温度下的驱动电流 由于系统的固定延时τ对电流的纹波存在影响,实际的驱动电流峰值是IMAX +τoff di/ dt , 电流谷值是IMIN - τon di/ dt ,τoff 为从驱动电流大于设定值到功率开关关闭的系统延时,τon 为从驱动电流小于设定值到功率开关导通的系统延时, di/ dt 是电感电流变化率。 则电感若取较大值,对驱动电流平均值影响不大,但可以减小电流纹波, 反之, 这是以增加外部电感体积为代价的。 电路可达很高的效率, 一方面检测电阻中的功耗 会导致电源功率耗散,但本设计中RSENSE = 0. 5Ω,则PRSENSE 相当小,另一方面,系统效率定义为LED 消耗的功率与电源提供的功率之比, 即η = PLED/ PPOWER. 其中, PPOWER =V in3 Ivin , PLED = V LED* ,从仿真可知, Ivin 的平均值远远小于 , 所以系统的效率可以达到非常高。 4 结束语 文中设计了一款适用于降压型L ED 恒流驱动芯片的滞环控制电路。 采用高边电流检测方案,运用滞环电流控制方法对驱动电流进行滞环控制,从而获得恒定的平均驱动电流,通过调节外部检测电阻,可调节恒定L ED 驱动电流。 芯片采用015μm 5V/18V/ 40V CDMOS 工艺,电源电压范围为4. 5V~28V ,可为L ED 提供约恒定的350mA 驱动电流,温度特性- 40 ℃~125 ℃,可达到相当高的效率。 当V in从4. 5V 变化到28V 时,平均驱动电流变化22mA ,最大恒流精度为6. 2 %. 




- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)