小功率智能化中频逆变电源的研制
摘要:研制一种基于TMS320LF2407A数字信号处理器和PS21964智能功率模块(IPM)的智能化SPWM中频逆变电源控制系统。对中频逆变电源的功率主电路、控制电路以及保护电路等进行了详细阐述。实现了中频逆变电源小型化和高性能的技术要求。
关键词:中频逆变电源;DSP;SPWM;IPM
0 概述
在武器装备电气系统中,400Hz中频逆变电源是其广泛使用的电源之一。在对其综合电气系统中的各电气设备进行性能测试与故障诊断时,需要400Hz中频逆变电源为其提供真实的模拟工作环境,以完成信号的采集与处理,从而判断出系统的工作状态,对所发生的故障进行精确定位。现有的400Hz中频逆变电源因其体积较大,不能满足测试设备小型化的要求,因此,我们研制了一种小功率智能化中频逆变电源,将其放在测试设备内部,减小了测试设备的体积,提高了测试设备的可靠性。
1 系统硬件设计
图1为中频逆变电源硬件原理图。
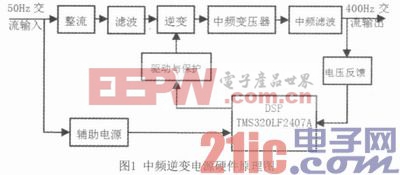
1.1 整流滤波电路
整流滤波电路是将220V、50Hz交流电通过全桥整流与电容滤波后得到311V直流电供给逆变电路中的IPM模块,为其提供直流母线电压。整流桥选用KBL608全桥整流模块,电容滤波器选用2只450V、470 μF的电解电容并联。
1.2 逆变电路
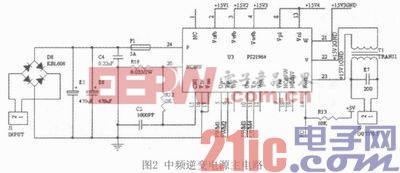
逆变电路选用三菱公司的PS21964智能功率模块。该模块具有以下特点:1)逆变桥采用第5代平面型IGBT和CSTBT功率芯片,损耗更低;2)采用自举电路结构,可单电源驱动;3)内置专用HVIC,可直接由DSP驱动;4)输入接口电路采用高电平驱动,增强了模块自保护能力;5)具有短路和控制电源欠压保护,6)体积小,只有38×24×3.5mm。
由于电源设计输出为单相交流电,而PS21964模块内部为三相逆变桥,故在电源设计时,选用其中两相(U、V)。PS21964模块既可单电源驱动,又可多电源驱动,设计时采用多电源驱动方式。在电路中,R18为电流检测电阻,实现短路保护;R12、C5为滤波电路;由于PS21964模块的故障输出端为漏极开路型,因此增加了R13上拉电阻。
1.3 中频变压器与中频滤波电路
中频变压器采用R型400Hz铁芯,铜制漆包线绕制,变比为1.05:1。由于系统中的载波频率为12kHz,因此中频滤波器的截止频率选为2kHz,借助中频变压器的漏感,根据计算公式计算可得滤波电容值为20μF,故选用耐压值为600V的CBB电容。
图2中频逆变电源主电路
1.4 电压反馈电路
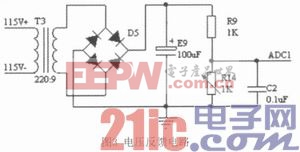
电压反馈电路是将输出电压调理后反馈给DSP的A/D转换端以实现电压平均值闭环反馈控制。
由于输出电压为115V、400Hz交流电,首先利用变压器将输出电压将变为0~5V的电压信号,经全桥整流、电阻分压后反馈到DSP的ADCIN 01脚。如图3所示。
1.5 DSP控制电路
TMS 3 2 O L F 2 4 O 7 A D S P控制电路主要由TMS320LF2407A芯片子系统和供电电路组成。TMS320LF2407A芯片子系统主要包括时钟、复位、外部存储、JTAG仿真接口等电路,其设计时可参考产品手册推荐电路进行选择。系统设计时,采用EVA事件管理器模块的PWM1~PWM4输出4路PWM波信号。
1.6 驱动与保护电路
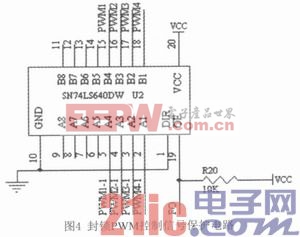
(1)封锁PWM控制信号保护。IPM的PWM控制信号经带控制端的三态收发器74LS640输出后送共态脉冲互锁电路。IPM的故障输出信号送入74LS640的使能端。当IPM没有故障发生时,74LS640选通,IPM正常工作;IPM发生故障时,74LS640截止,封锁所有IPM的控制信号,关断IPM,达到保护目的。如图4所示。
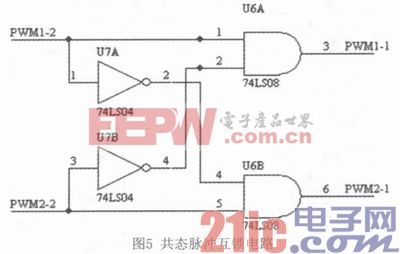
(2)共态脉冲互锁电路。在使用IPM的过程中我们发现,当选取IPM时,若留出足够的余量,IPM一般情况下不容易损坏,但有时仍有损坏情况发生,分析其原因,均为发生过流,通过测量微处理器输出的PWM信号,发现同一桥臂的控制信号在主电路为高压大电流情况下很容易叠加干扰信号,致使同一桥臂的两个IGBT发生直通,导致模块损坏。为此我们设计了共态脉冲互锁电路,这样即使有干扰,甚至由于某种原因,微处理器不能正常输出,也能保证同一桥臂的两个IGBT不能同时导通,达到保护的目的。电路图如图5所示。
1.7 辅助电源电路
该系统的电源主要有+5V、+3.3V和+15V三种。+5V为主电源,采用AC/DC模块实现;+3.3V主要用于DSP系统,采用TPS7333芯片实现;+15V电源用于IPM模块,采用金升阳公司的B0515实现。
2 系统软件设计
本电源的控制软件主要包括:1)双极性SPWM控制信号程序设计;2)平均值稳定程序设计;3)输出过压保护程序设计。
双极性SPWM控制信号采用对称规则采样法实现。其中标准正弦波(即调制波,同输出正弦波频率400Hz),采用离线计算方法,首先将这些数据计算出来,并存入数组,在程序运行时调用。标准三角波是利用DSP计数器的连续增/减计数模式实现的,其载波频率为12kHz。
平均值稳定程序采用PI调节,反馈信号经滤波采样后,与给定信号进行比较,其偏差送至PI调节器,改变调制度M,从而使输出电压维持恒定,实现输出稳压。
输出过压保护采用限幅比较法,反馈信号经滤波采样后,与限定值进行比较,若超出,则输出保护信号,中断主电路运行,实现输出过压保护。
系统软件由初始化模块和定时器中断模块组成。初始化模块主要完成中断控制器、I/O控制器、事件管理器、时钟管理器、看门狗、A/D转换器等控制寄存器进行初始化和相关变量的初始化,初始化模块的流程如图6所示。初始化完成后,DSP程序进入死循环,等待中断的发生。定时器中断模块的主要工作是通过片内A/D转换器采样输出电压,作为系统实现闭环控制的反馈信号,通过给定信号与反馈信号进行比较,经PI控制调节,得到相应的控制量,经规则采样法计算得到每一个周期的脉冲宽度,以获得四路PWM信号,实现对IPM的控制。其流程图如图7所示。
- 小功率智能化中频逆变电源的研制 小型化和高性能(08-04)
- IR2110驱动电路的优化设计(03-15)
- 基于CAN通信的电源监控系统的设计(04-06)
- 浅谈LDO的压差(Dropout)和功耗(Power Dissipation)(02-07)
- TPS54350在信号处理系统中的应用(06-09)
- AD7656的原理及在继电保护产品中的应用(06-18)