矩阵式整流器输入功率因数补偿算法
摘要:矩阵式整流器中的输入滤波器会导致滤波前后电流的基频分量存在相位差,降低矩阵式整流器的输入功率因数。推导了滤波器造成电流偏置角的解析表达式,提出了一种输入功率因数补偿算法,通过PI调节器实时计算最佳补偿角度,并利用电流型空间矢量调制(SVM)策略实现矩阵式整流器的最大功率因数运行。该算法在计算过程中无需引入滤波器的实际参数,可避免由于参数摄动所造成的误差。详细介绍了该补偿策略的工作原理,并进行了实验研究,通过实验结果,验证了算法的可行性和有效性。
关键词:矩阵式整流器;空间矢量调制;输入功率因数
1 引言
三相AC/DC矩阵式变换器(以下简称矩阵式整流器)是一种由三相AC/AC矩阵式变换器发展而来的通用整流器,具有正弦输入电流,单位功率因数运行,能量可双向流动,可输出双向电流和电压,无需大容量储能元件等优点。不仅可应用在直流电机驱动,直流励磁等领域,还可作为一种双级矩阵式变换器的前级电路,应用在双馈风力发电系统中。
在矩阵式整流器系统中,需加入LC滤波器,以滤除输入电流中由于主电路开关动作而产生的高次谐波分量,从而减少对电网的谐波污染。但LC滤波器的加入也会带来诸多问题。
此处提出了一种基于电流型SVM的输入功率因数补偿算法。该算法通过将输入电流和电压的检测值变换至两相静止坐标系下,取得输入电
流相角与输入电压相角的误差,利用PI调节器计算最佳补偿角度,并利用电流型SVM策略对输入电流的相位进行控制,实现矩阵式整流器的最大功率因数运行。
2 电流型空间矢量调制算法
图1示出矩阵式整流器的主电路拓扑,其中6个双向开关V11~V23共有9种通断组合,可映射为图2a中复平面上的6个非零电流矢量I1~I6和3个零电流矢量I0a,I0b,I0c共9个静止电流矢量。同时,I1~I6将复平面分为6个扇区Ⅰ~Ⅵ。对于网侧输入电压ua,b,c,网侧输入电流ia,b,c,开关矩阵输入电流iia,ib,ic,可通过Park变换遵循幅值不变的原则,将其分别映射为复平面内匀速旋转的网侧输入电压矢量us,网侧输入电流矢量is和开关矩阵输入电流矢量ii。
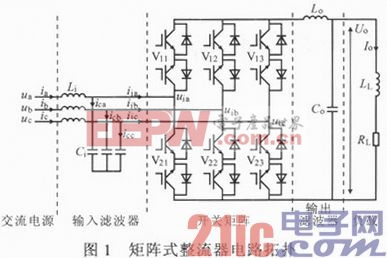
图2a中,γ为设定的输入电流角位移,δ为输入滤波器造成的输入电流偏置角,ψ为网侧输入功率因数角。当ii位于某一个扇区时,可利用组成该扇区的两个非零电流矢量iα和iβ通过脉宽调制的方式进行合成,如图2b所示,合成公式为:
ii=dαiα+dβiβ+d0f0 (1)
式中:dα,dβ和d0为调制度,dα=Msin(π/3-φ),dβ=Msinφ,d0=1-dα-dβ,φ为ii与iα的夹角,φ=(θu-γ)mod(π/3),mod表示取余数运算,M为调制度,M=2Uo(3Uscosγ)=q/cosγ,q为电压变比,q=2Uo/(3Us),Uo为直流输出电压,Us为交流相电压的幅值,即us的模值。

通过这种合成方式,不仅可得到正弦的输入电流,还可通过改变γ值来控制输入功率因数。由于M≤1,因此通过M=2Uo/(3Uscosγ)可得,电流型SVM算法对开关矩阵输入电流相位的调整角度存在最大值γmax=cos-1[2Uo/(3Us)]。
3 输入滤波器分析
矩阵式整流器中的输入滤波器通常为LC结构,如图1所示。根据图1列写矩阵式整流器输入侧电流电压方程:

式(4)说明,δ不仅与输入滤波器的参数有关,还与Is有关,与负载间接有关。矩阵式整流器在调制输入电流的过程中,通常忽略输入滤波器造成的输入电流相移,认为is与ii同相(即δ=0),因此当γ=0时,认为ψ=γ=0,矩阵式整流器近似工作在单位功率因数下。
但δ是客观存在的,因此由图2a可见,当ii与us同相时,ψ=δ≠0,输入功率因数不为1。且δ与Is近似成反比,负载越轻,Is越小,δ越大,输入滤波器造成的功率因数下降就越严重。
4 输入功率因数补偿算法
由上述理论分析可见,若将输入滤波器参数Li和Ci及实际检测得到的Us和Is代入式(4),实时计算δ的值,并控制δ,即可真正实现矩阵式整流器单位功率因数运行。所设计的输入功率因数补偿算法无需滤波器参数,算法简单,鲁棒性更强。图3为补偿策略算法框图。
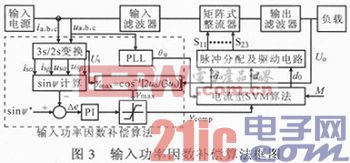
该补偿策略利用PI调节器产生最佳补偿角度,PI调节器的输入为期望功率因数角ψ*及实际功率因数角ψ的正弦值之差△e=sinψ*-sinψ。
PI调节器的输出经过限幅环节后,作为设定的输入电流角位移γcomp送入电流型SVM算法,进行调制度计算。由于矩阵式整流器的输入功率因数通常要求为1,因此sinψ*=0,当sinψ自动跟踪sinψ*时,矩阵式整流器即可实现单位功率因数运行。为了计算sinψ,需将ua,b,c和ia,b,c变换至两相静止α,β坐标系下,得到[usα usβ]T和[isα isβ]T,变换矩阵如下:
5 实验结果分析
在一台基于IGBT的矩阵式整流器实验样机中进行实验。采用TMS320F2812型DSP作为主控制器,实现SVM算法和功率因数补偿算法;利用XC9572XL型CPLD进行脉冲分配和四步换流策略的实施;由G80N60UFD型IGBT构成主电路。各参数为:输入电压每相90 V/50 Hz,输入滤波器
3 mH/13μF,输出滤波器9 mH/20μF,阻感负载25 Ω/5 mH.开关频率12 kHz,PI调节器中比例系数Kp=0.1,积分时间常数Ki=50。图4示出2种不同工况下,补偿前后网侧输入电压、电流ua,ia和输出电流Io的实验波形。
- 配电网静止同步补偿器直接功率控制(03-20)
- 现代高频开关电源提高输入功率因数的主要方法(09-24)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)