基于STM32的智能循迹往返小车设计
时间:08-23
来源:互联网
点击:
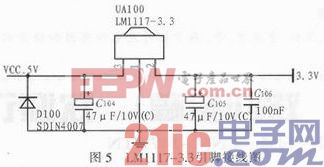
2)本设计采用LM1117—3.3芯片将5 V转换为3.3 V,具体电路设计如图5所示。
 2 系统软件设计
2 系统软件设计
系统软件设计采用C语言编程实现,利用单片机PWM输出模块和普通I/O模块,根据系统需求,对各个模块进行初始化配置,以实现其相应功能。主程序流程如图6所示。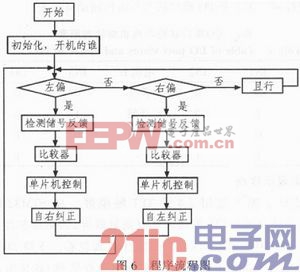 3 结论
3 结论
文中根据设计内容和要求,制定了设计方案,并逐步完成了硬件和软件部分的设计。整个系统以STM32为主控芯片,实现对小车简单运动的控制,完成各部分电路设计并使用PROTEL画出电路设计原理图;软件部分在STM32集成开发环境IAR EWARM 5.3下编写各模块程序,包括PWM波输出模块、液晶显示模块自由行走避障模块和红外循迹模块,并通过主控制程序将各模块融合一起。整个设计将硬件与软件相结合,实现对小车的控制,使小车能够做出前进、后退、左转、右转等动作,并通过液晶显示器实时显示小车的运动参数,及对小车速度进行调节,并且能够在不同模式下通过传感检测电路实现简单的避障和循迹功能,在本次设计中将PWM波占空比控制在1/2以下,使小车不会因速度过高而导致转弯过程中其方向不易控制。论文基本完成了硬件和软件的设计,并使之符合设计要求。
本设计与实际应用相结合,利用高性能的STM32F103芯片,辅以各种传感器来检测路面、障碍物等周围环境,通过高可靠性的软件设计,来实现小型电动车的智能控制,具有很强的现实意义。
循迹小车 反射式红外传感器 PWM STM32F103 直流电机 相关文章:
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 高效地驱动LED(04-23)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 隔离式MOSFET驱动器集成电路的功率效率在轻负载时得到改善(07-31)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)