基于ARM 的高分辨率压电陶瓷驱动电源设计方案(一)
为温度漂移(温漂),温漂的大小随时间而变化。PA78的失调电压和温漂分别为8 mV、-63 V/°C,并且失调电压和温漂都是随机的,使PA78无法应用于毫伏级分辨率的电压输出,需要对放大电路进行改进。
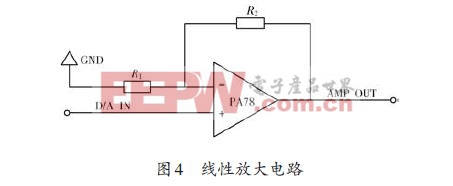
3.2 放大电路的改进
这里将PA78视为被控对象G(S),将失调电压和温漂视为扰动N(S),这样就把提高放大器输出电压精度转化成减小控制系统的稳态误差的控制器设计的问题。在控制器的设计中常用的校正方法有串联校正和反馈校正两种。一般来说反馈校正所需的元件数少、电路简单。但是在高压放大电路中,反馈信号是由PA78的输出级提供。反馈信号的功率较高,为元件选型和电路设计带来不便,故线性放大电路中不使用反馈校正法。而在串联校正方法中,有源器件的输入不包含高压反馈信号,所以该设计采用串联校正方法,采用模拟PI(比例-积分)控制器G1(S)进行校正,如图5 所示。
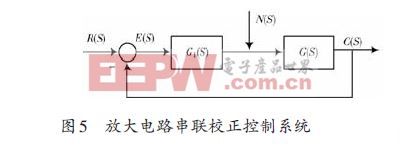
成比例的反应输入信号e(t)及其积分,即:
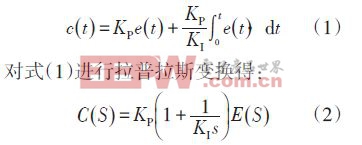
由式(2)观察可得,PI控制器相当于在控制系统中增加了一个位于原点的开环极点,开环极点的存在可以提高系统的型别,由于系统的型别的提高可以减小系统的阶跃扰动稳态误差(对于线性放大电路,可视失调电压和温漂为阶跃扰动)。同时PI控制器还增加了一个位于复平面中左半平面的开环零点,复实零点的增加可以提高系统的阻尼程度,从而改善系统的动态性能,缓解由牺牲的动态性能换取稳态性能对系统产生的不利影响。
放大电路的设计中采用有源模拟PI控制器,改进后的线性放大电路如图6所示。其中PI控制器的放大器采用AD8676,AD8676的输入失调电压低于50 μV(满温度行程下),电压噪声≤0.04 μV(P-P)@0.1~10 Hz,因此适合用于串联校正环节,以提高系统稳态性能、减小输出电压漂移。
3.3 相位补偿
从工程角度考虑,由于干扰源的存在,会使系统的稳定性发生变化,导致系统发生震荡。因此保证控制系统具有一定的抗干扰性的方法是使系统具有一定的稳定裕度即相角裕度。
由于实际电路中存在杂散电容,其中放大器反向输入端的对地电容对系统的稳定性有较大的影响。如图6所示,采用C5和C6补偿反向端的杂散电容。从系统函数的角度看,即构成超前校正,增加开环系统的开环截止频率,从事增加系统带宽提高响应速度。
PA78有两对相位补偿引脚,通过外部的RC网络对放大器内部的零极点进行补偿。通过PA78的数据表可知,PA78内部的零极点位于高频段。根据控制系统抗噪声能力的需求,配置RC网络使高频段的幅值特性曲线迅速衰减,从而提高系统的抗干扰能力。图6中,R4,C1与R5,C2构成RC补偿网络。

此外电路中C3的作用是防止输出信号下降沿的振动引起的干扰;R10起到偏置电阻的作用,将电源电流注入到放大器的输出级,提高PA78的驱动能力。
将PI控制器的参数分别设置为KP=10、KI=0.02;超前校正补偿电容分别为12 pF和220 pF;RC补偿网络为R=10 kΩ、C=22 pF.利用线性放大电路的Spice模型进行仿真得到幅频特性和相频特性曲线如图7所示。从图中观察可得,放大系统的带宽可达100 kHz,从而保证了系统良好的动态特性,同时相角裕度γ>60°使系统具有较高的稳定性(由于PZT的负载电抗特性一般呈容性,所以留有较大的相角裕度十分必要)。

- 用于电压或电流调节的新调节器架构(07-19)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 适合高效能模拟应用的线性电压稳压器(07-19)
- 低功耗嵌入式实现的方方面面(04-30)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 开关模式LED驱动器的调光技术(10-20)