频率跟踪在大功率串联谐振全桥逆变产品中的重要性
大功率(15KW以上)感应加热产品通常会采用全桥逆变技术。在其工作时,由于负载变化、环境温度变化及调功要求等原因会引起的工作频率的变化。为了使逆变器始终工作在适合的频率上从而得到相应恒定的功率,控制电路就必须能够实现对负载频率的跟踪。频率跟踪电路不仅要对负载频率进行跟踪、采集,更要通过锁相技术将负载工作频率锁定在与控制信号频率同频,从而得到相应恒定的功率。更进一步可以对采集到的负载工作频率信号进行处理用于实现其他功能,如移相PWM(脉宽调制Pulse Width Modulation)中的移相调功。从这个意义上讲,频率跟踪在全桥逆变应用中是十分重要的。
串联谐振逆变器基本结构

串联谐振逆变器基本结构
它包括直流电压源Ud,和由开关S1~S4组成的逆变桥及由R、L、C组成的串联谐振负载。其中开关S1~S4可选用IGBT、SIT(静态感应晶体管Static Induction Transistor)、MOSFET(金氧半场效晶体管Metal-Oxide-Semiconductor Field-Effect Transistor)、SITH(静电感应晶闸管Static Induction Thyristor)等具有自关断能力的电力半导体器件。逆变器为单相全桥电路,其控制方法是同一桥臂的两个开关管的驱动信号是互补的,斜对角的两个开关是同时开通与关断的。
控制方式
1)调幅控制(PAM,Pulse Amplitude Modulation)是通过调节直流电压源输出(逆变器输入)电压Ud(可以用移相调压电路,也可用斩波调压电路加电感和电容组成的滤波电路,来实现调节输出功率的目的。)即逆变器的输出功率通过输入电压调节,由锁相环(PLL)完成电流和电压之间的相位控制,以保证较大的功率因数输出。
这种方法的优点是控制简单易行,缺点是电路结构复杂,体积较大。
2) 脉冲频率调节(PFM,Pulse Frequence Modulation)是通过改变逆变器的工作频率,从而改变负载输出阻抗以达到调节输出功率的目的。
从串联谐振负载的阻抗特性:

可知,串联谐振负载的阻抗随着逆变器的工作频率(f)的变化而变化。对于一个恒定的输出电压,当工作频率与负载谐振频率偏差越大时,输出阻抗就越高,因此输出功率就小,反之亦然。
脉冲频率调制方法的主要缺点是工作频率在功率调节过程中不断变化,导致集肤深度也随之而改变,在某些应用场合如表面淬火等,集肤深度的变化对热处理效果会产生较大的影响,这在要求严格的应用场合中是不允许的。 3) 脉冲密度调制(PDM,Pulse Density Modulation)就是通过控制脉冲密度,实际上就是控制向负载馈送能量的时间来控制输出功率。其控制原理如图:
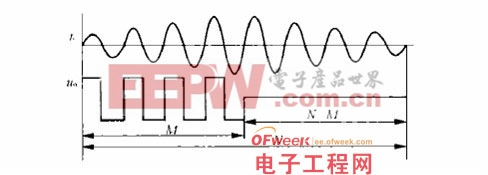
PDM控制原理图
这种控制方法的基本思路是:假设总共有N个调功单位,在其中M个调功单位逆变器向负载输出功率;而剩下的N-M个单位内逆变器停止工作,负载能量以自然振荡形式逐渐衰减。输出的脉冲密度为M/N,这样输出功率就跟脉冲密度联系起来了。因此通过改变脉冲密度就可改变输出。
脉冲密度调制方法的主要缺点是:逆变器输出细度的频率不完全等于负载的自然谐振频率,在需要功率闭环的场合中,工作稳定性较差。由于每次从自然误差振荡状态恢复到输出功率状态时要重新锁定工作频率,这时系统可能失控。因此在功率闭环或者温度闭环的场合,工作的稳定性不好。其另一个缺点就是功率调节特性不理想,呈有级调功方式。
4) 谐振脉冲宽度调制(PWM):

PWM中各信号波形
如图2-3,谐振脉冲宽度调制是通过改变两对开关管的驱动信号之间的相位差来改变输出电压值以达到调节功率的目的。即在控制电路中使原来同相的两个桥臂开关(S1,S3)、(S2,S4)的驱动信号之间错开一个相位角,使得输出的正负交替电压之间插入一个零电压值,这样只要改变相位角就可以改变输出电压的有效值,最终达到调节输出功率的目的。
这种控制方法的优点是电源始终工作在谐振状态,功率因数高。但存在反并联二极管的反向恢复问题、小负载问题、软开关实现问题。
调功控制方式选择与频率跟踪
上述各种调功控制方式都有各自的优缺点,因此一些复合型控制方法的研究日益引起重视,脉宽加频率调制方法就是一种较好的控制方法。
一般的全桥逆变器中,常用的移相PWM方法的工作频率是固定的,不需考虑负载在不同工作频率下的特性。而在串联谐振感应加热电源中使用移相PWM方法时,则要求其工作频率必须的始终跟踪负载的谐振频率,通常使某一桥臂的驱动脉冲信号与输出电流的相位保持一致,而另外一个桥臂的驱动脉冲信号与输出电流的相位则可以调节。S1和S4驱动信号互补,S2和S3驱动脉冲信号互补,S1驱动信号相位与负载电流的相位保持相同,而S3的驱动俯冲与S1的驱动脉冲
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 高效地驱动LED(04-23)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 隔离式MOSFET驱动器集成电路的功率效率在轻负载时得到改善(07-31)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)