一种高性能可智能控制型LED路灯驱动电源的设计
摘要:本文针对传统驱动电源电能损耗大、效率和智能化程度低的缺点,设计了一款适用于大功率LED路灯的高性能可智能控制型驱动电源。本文选择了多级驱动方案,即功率因数校正(PFC)电路、LLC谐振控制电路和多路恒流输出的三级式结构。本文采用合理的设计,优化了功率校正因数,增大了输入电压范围,提高了整机效率,使输出电流在全负载范围内更加稳定,同时增加了PWM调光控制功能,可根据外界环境的变化智能控制LED路灯的亮度,从而达到进一步节能减排的效果。
引言
由于具有高光效、长寿命、灯具效率高、环保和易于调光控制等优点,半导体照明是目前被各国公认为最有发展前景的高效照明产业,被称作继白炽灯、荧光灯后照明光源的又一次革命[1]。我国推出的“十城万盏”计划[2],使LED路灯得到了越来越多的应用。但是,LED路灯在取代传统路灯的道路上还有许多亟待解决的难题,主要包括光学设计、散热以及驱动电源等问题,同时智能控制和无线通信也成为LED路灯的研究重点。
本文采用多级驱动方案,使驱动具有较高的功率因数和效率,并解决了传统方案驱动器件多、成本高、体积大的缺陷。易于调光控制也是LED照明的一大优点,设计中采用了可PWM调光的模块,使得驱动电源具有智能控制的接口,便于在此基础上开发LED路灯智能照明控制系统。
1 系统结构
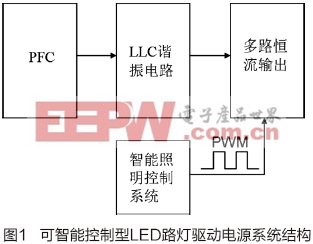
本系统采用3级驱动电路结构,系统结构图如图1,前级是功率因数校正电路,主要作用是采用谐波抑制技术限制谐波的含量。中间级是LLC谐振电路,完成隔离和降压功能,保证电路具有较高的转换效率。最后一级为恒流输出电路,为LED提供恒定的电流,同时具有PWM调光控制功能,通过智能控制系统来调节LED的亮度。
2 驱动电路原理及实现
2.1 PFC电路的设计
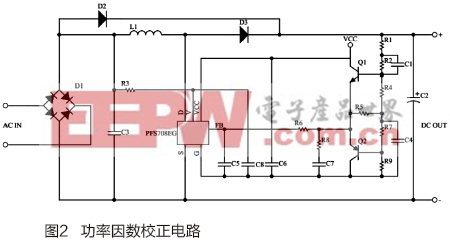
为了提高电能的利用率,现在一般的开关电源都需要在前级加入功率因数校正(PFC)电路[3],其中升压PFC有源功率因数校正是最具成本效益的方法。本文采用PI公司推出的PFS708EG专用芯片,该芯片具有极高的集成度,集成了一个连续导通模式(CCM)升压PFC控制器、栅极驱动器、超低反向恢复二极管和高压功率MOSFET,采用了创新的恒定伏秒/安秒控制方法,可极大减少元器件数量、降低装配成本和布板尺寸[4]。图2所示为PFS708EG的典型应用图。
本设计采用一种恒定的安培-秒导通时间和恒定的伏-秒关断时间控制方法,该方法可以调节输出电压和整形输入电流以使其符合谐波电流限值(高功率因数)。即控制开关电流在导通时间内具有恒定的安培-秒从而使平均输入电流跟随输入电压,同时保持由升压电感器的电磁特性所决定的恒定的伏-秒平衡,从而调节输出的电压和功率。如下所示,设置关断时间(toff)的恒定伏-秒为:

上式表明,输入电流iIN正比于输入电压VIN,因此满足了对于功率因数校正的基本要求。
由上述原理可知,在升压PFC电路中电感L1用于当MOSFET导通时储存能量,而对于本设计中的连续导通模式,当MOSFET关断时只有一部分储存的能量被传递到输出电路。设计中所需的最小电感值的计算方式如下:
其中VO为PFC端的输出电压,VIN为PFC端瞬时输入电压,VMIN(PK)是低线路输入电压峰值,△I为纹波电流的峰峰值,FS为电路的开关频率,D为占空比。图中C2为PFC端输出电容,作为能量储存器为输出电压滤波,决定了输出电压的纹波,输出电容既要满足保持时间所需的电容值,也要求满足输出纹波的要求,其计算方式如下面两式所示,选取计算所得的较高电容值作为输出电容值。

2.2 LLC谐振电路设计
LLC谐振电路是LED路灯驱动电路的核心部分,LLC谐振电路是在传统串联和并联LC谐振电路的基础上产生的,它实现了软开关,具有较高的功率密度和效率。本设计采用PI公司生产的LCS702HG控制芯片,它集成了LLC控制器、上管和下管驱动器以及两个半桥MOSFET,此控制器通过改变频率,使得MOSFET在零电压时切换,消除了损耗,提高了效率,其高度的集成度减少外部元器件多达30个,降低了成本且减小了PCB面积[5]。其电路设计如图3所示。

LLC转换器要求在开关半周期之间具有固定的死区时间。如图3所示,连接于DT/BF引脚、VREF引脚和接地引脚之间的电阻分压器用于设定死区时间,最大启动频率以及脉冲阈值频率。FB引脚是反馈回路的频率控制输入端。频率与反馈引脚电流成正比。引脚HB的输出通过一个谐振电容C2驱动输出变压器T1,该电容用于确定工作纹波电流和在故障条件下能够承受的高电压。
变压器T1的漏感设计为50μH,这样和谐振电容C2一起确定了初级串联谐振频率,如下式所示:

其中
LED 驱动电源 PFC LLC PWM MOSFET 201503 相关文章:
- 高效地驱动LED(04-23)
- 电源设计小贴士 6:精确测量电源纹波(03-21)
- 构建一个低成本的9V电池电压监控器(07-28)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 电源设计小贴士 7:高效驱动 LED 离线式照明(04-05)
- 隔离式MOSFET驱动器集成电路的功率效率在轻负载时得到改善(07-31)