智能交通之汽车车牌定位识别设计与实现,软硬件协同
种方法是将图像中每一行中R个连续的水平方向梯度值相加,而梯度值则是由水平方向相隔2d-1个点的象素点的灰度的差值。
求梯度的系统框图如下:

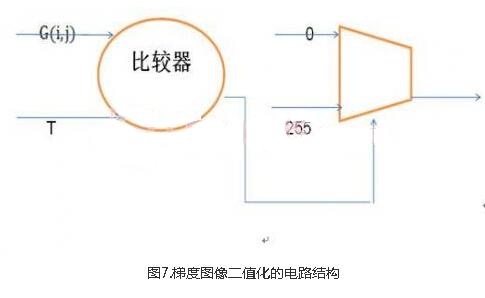
5.4 梯度图像的二值化

为了方便后续的工作,需要对灰度图像进行二值化。根据下式对经过第4步求出的梯度图像进行二值化。根据下式获得阈值。
其中,G(i,j)为梯度处理后的灰度图像的像素值。 根据得到的阈值对灰度图像进行图像的二值化。其二值化的电路框图如下:
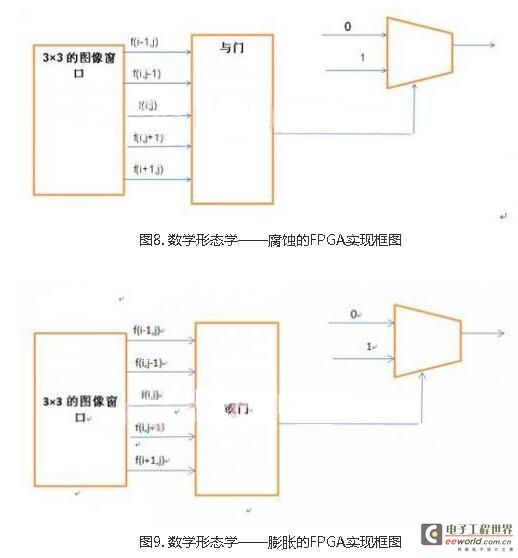
5.5 数学形态学处理
数学形态学(Mathematical Morphology)是分析几何形状和结构的数学方法,是建立在集合代数基础上,用集合论方法定量描述几何结构的科学吲。数学形态学是由一组形态学的代数算子组成的。最基本的形态学算子有:腐蚀、膨胀、开和闭。对于后两个,开是先腐蚀后膨胀,闭是先膨胀后腐蚀。
腐蚀的作用是消除物体边界点,使目标缩小,可以消除小于结构元素的噪声点;膨胀的作用是将与物体接触的所有背景点合并到物体中,使目标增大,可添补目标中的空洞。
开运算是先腐蚀后膨胀的过程,可以消除图像上细小的噪声,并平滑物体边界。
闭运算时先膨胀后腐蚀的过程,可以填充物体内细小的空洞,并平滑物体边界。
本设计中,对于先前得到的二值化图像,先用一次膨胀,使车牌区域合并到一起,然后再对其进行一次闭运算,即先膨胀后腐蚀。去掉一些细小的干扰和粘连。
因为本设计中,需要加强的水平和垂直方向的边缘,所以选择如下表所示的结构元素。

数学形态学的FPGA设计,在本设计中,所用的3×3的结构元素,需要一个3×3的窗口,此窗口的设计和中值滤波器中所设计的窗口完全相同。
结构元素的运算单元的设计:
腐蚀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个非0像素与其覆盖的像素做“与”操作,如果都为1,则该像素为1,否则为0。
膨胀的具体操作是:用一个结构元素(一般是3×3的大小)扫描图像中的每一个像素,用结构元素中的每一个非0像素与其覆盖的像素做“与”操作,如果都为0,则该像素为0,否则为1。
5.6 用“投影法”来实现车牌定位
对数学形态学处理后的二值化的车牌图像沿水平方向进行投影,以确定车牌所在区域。投影值为每一行的白色像素点的累加值。对投影值进行分析,如果投影值大过阈值R时,认为可能是车牌所在区域。如果从该行起连续10行的投影值都大于阐值R,则认为是车牌的可能所在区域,并将其标出。
定位出的车牌可能区域有几个,需要对其进行再次的定位,以确定出车牌所在区域条。本设计中从下往上,对每一个车牌可能区域进行垂直方向的投影,投影值为白色像素点的累加值。然后从左往右查找累加值不为零的投影点。找到后从该点开始,找第一个为零的投影点。根据这两点得到两点间的距离,如果此距离大于预设的经验阈值P,则认定此区域为车牌所在区域,然后将车牌的区域的4个顶点坐标输出。
投影法的FPGA设计框图如下:

智能交通车牌定位识别设 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)