软件GPS原理与应用
全球卫星定位系统发展至今己有二十余年的历史。其应用主要都是基于一个完整的,独立的系统方案,主要架构不外乎天线、射频前端、基带处理器、中央处理单元、存单元、晶振等。所设计出的产品多为航空用,船用,及车用之导航设备,由于尺寸,功耗,成本,及接收灵敏度等的种种考虑而难以与其它个人消费性产品相结合,如个人移动电话。本文将介绍最新的技术架构,仅使用射频前端芯片,及相应的软件而能与行动装置相结合之软件卫星定位方案。
全球卫星定位系统概况与介绍
全球定位系统(Global Positioning System)是一套由美国国防部建构的卫星定位系统,其基本原理乃是利用绕着地球的24 颗卫星所发射的信号,再加以几何上的计算,来得到接收者的笛卡尔坐标(Cartesian Coordinate),另一个与此相当的系统是由前苏联所建构之定位系统(Global Navigation Satellite System,GLONASS),基本上,此系统也是由24 颗卫星所组成,这24颗卫星分别分布在3个轨道面,每一个轨道面又分别由8 颗卫星以相差45度(Latitude)均匀分布,此轨道面之高度约为19100Km,卫星运行一周需费11小时又15分钟,因为本文主要是介绍美国所建构之定位系统(Navstar GPS),所以有关GLONASS的部分就不多叙述。
简单地说,全球定位系统是一个以空间为基准,利用无线电波与时间差来测量距离的一个系统,它能够提供精准的位置数据、速度、以及时间。整个系统可以被区分为三大部分,我们称之为Space Segment、Control Segment和User Segment。
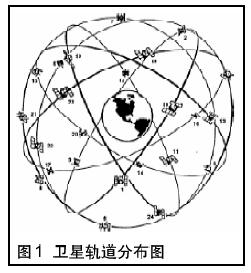
第一个Space Segment,主要就是由24颗卫星运行于半同步轨道,所谓半同步轨道指的就是卫星运行一周需费大约12小时(11小时58分钟) 所以在一天之中,同一颗卫星刚好出现在一个固定不动的使用者的头顶上两次(23小时又56分钟),这24颗卫星以每个轨道4 颗卫星均匀的分布在6个轨道面上,每个轨道面都与赤道相差55度的倾斜角,而这些卫星所在的轨道高度平均约为20200Km,图1为卫星轨道分布图。
这24颗卫星所发射出来的测距信号有两个频道( D-Band ),其一称之为L1,发射频率为1575.42MHz;其二为L2,发射频率为1227.6MHz。这两个为载波频率负责将扩频信号以高频载波来传送,GPS所使用的是扩频通讯(Spread-Spectrum)技术。扩频所调制的测距码(ranging codes)又可分成两种:一为1.023MHz的C/A码(coarse/acquisition codes),顾名思义,依据这个码所得到的精确度较为粗略,而且C/A码也只用L1来调制,专门开放给一般商业用途的使用者;另外一个测距码是10.23MHz的P码( Precision Codes),这个码同时调制在L1及L2载波上,由于P码的Chip较短,因此能够得到较精准的定位。这两种测距码都能够被用来测量卫星与接收者之间的距离,然而通常P code还会被加密而且也只开放给被授权的使用者,所以P Code 通常也只应用在军事用途的定位系统上,也因为有这样不同的两组码,全球定位系统又被区分成所谓标准定位服务(Standard Positioning Service,SPS),以及精确定位服务(Precise Positioning Service,PPS),其中标准定位服务就是只使用C/A码在L1载波上,而精确定位服务除了使用C/A码在L1载波上,也再加上P code于L1和L2两个载波,除了这些测距码之外,最后也是最重要的就是一个50Hz的数据信息码。这个码载有的数据包括了卫星时序数据、卫星精确轨道数据(ephemeris),此数据只含有发射信号的卫星本身的轨道数据、卫星基本轨道数据(almanac data),此数据含有所有卫星的基本轨道数据及信号传播于电离层的修正数据。
Control Segment,这主要是由各个位于不同地点的地面控制站台所组成。其主控制站台(Master Control Station, MCS)位于美国科罗拉多州,其余几个站台则均匀沿着赤道分布。这些地面控制站的主要任务就是间测及控管这些在太空中运行的卫星,其功能包括有卫星轨道控管、卫星轨道数据更新、卫星本身维护等。这个系统之运作流程是由各个子站台分别接收它们所锁定的卫星的轨道数据,然后透过美国的防卫卫星通讯系统将数据传送到主控制站台进行轨道数据的估计及再预测,然后再将新的轨道数据通过地面天线站上载至各个卫星。
最后一个部分User Segment,才是跟一般使用大众有密切关系。所谓User Segment,其实指的就是GPS接收器,也就是本文要探讨的主角,其功能射频接收、译码以及处理卫星的轨道数据,进而计算出接收器的位置。
GPS的传统架构
一般商业用的GPS芯片组大体都是由天线、低噪音放大器、前端滤波器、射频IC、晶振、 存储器芯片与基频IC(内含中央处理单元)所组成。如
- 美国GPS系统的管理与运营(02-07)
- 基于GPS的数据采集系统的研究(01-15)
- 展频技术完美解决GPS搜星灵敏度难题(01-04)
- GPS的信噪比很高,为何定位时间却很长?(05-25)
- 从技术层面上分析北斗与GPS的九大区别(05-08)
- 北斗卫星导航试验系统(北斗一代)(02-04)