基于网络技术的CCD图像采集系统研究
地址的管理和控制赋予一定的权限,只有授权的用户才可以调用CCD的图像。同时考虑到现场所有的CCD都是在同一个外触发信号下采集,采集完成后图像保存在自带的帧存储器内。对于多台CCD都直接与工业以太网连接,如果CCD的图像都上传到网络上,网络流量增大,会造成网络阻塞。因此,为了避免这个问题,在设计上要求CCD对于所采集到的图像不是主动上传到以太网,而是保存在自身的帧存储器中等待授权用户来调用,只有接收到调用指令后,CCD才把帧存中的图像上传。
对于远场CCD和监漂CCD,其主要功能是提供远场准直和光路监漂的图像,图像的质量要求不是太高,因此对于其图像传输的网络接口选用一般的电网口(RJ45)。对于科学CCD,考虑其不仅提供近场准直,同时更主要的是满足近场的精密测量,因此对于图像的质量要求高,图像在传输过程中尽量减少干扰,避免带来测量误差。所以对科学CCD的网络接口要求选用光纤网络接口。光纤传输受到外界的电磁干扰比较小,对传输图像影响小,确保图像的完好性。
3 CCD采集系统具体的工作流程
光路中的组件(如远场/近场透镜、衰减器)要求有很高的定位精度和重复精度,以保证所有运动组件的光轴偏差在许可范围内,同时要求调整方便、性能可靠。这些组件的精确定位都由位置调节机构来完成。电动位置调节机构的控制由PLC、步进电机驱动电源(脉冲分配器和功率驱动)、步进电机、机械传动件等部分组成,电机驱动调整过程中,保证光学元件运动的平稳性、重复性、精度,避免振动导致光束控制的不确定性。具体的工作流程图2所示。

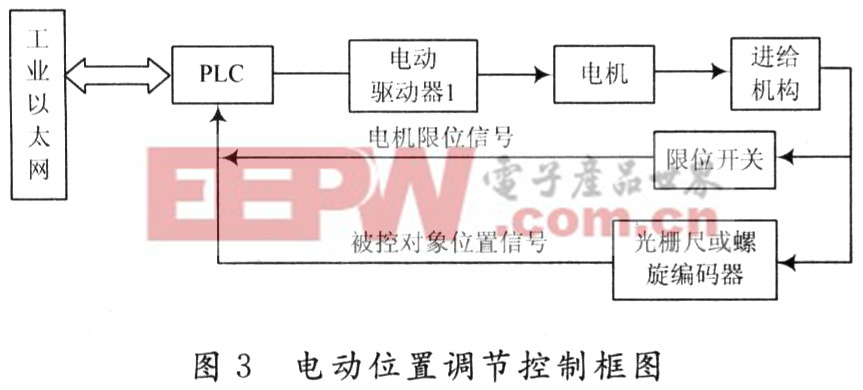
系统在准值阶段时,首先,系统上电后,通过软件的信息交互对CCD进行操作。一方面按照要求设置CCD的各种状态参数;另一方面检测CCD的工作状态(加电等)是否完好。外触发信号到来后,CCD曝光采集图像,图像保存在帧存储器中,当接收到网络调用指令后,CCD通过网络上传所采集的图像。其次,准值FEP接收到图像后计算应加给步进电机的脉冲数,并把这个脉冲数传给PLC。再次,位置调节控制单元采用PLC作为中央处理中心,由PLC给出事先经过计算的脉冲信号和方向信号,经脉冲分配器以及细分电路产生步进电机工作所需的各相脉冲信号,再通过光电耦合器和功率驱动电路对信号进行放大,产生电机所需的激励电压并驱动电机工作。最后,步进电机到达预设的位置后,通过安装在电机上的轴角编码器来反馈电机运行的数据及电机的位置,并上报给现场控制中心,如果达到正确的位置,则停止动作,如果位置不正确,则重复计算脉冲再命令步进电机运动。如图3所示。
准值完成后(打靶时对图像的采集、监视过程是上述准值过程的第一步过程)将图像保存到现场控制中心,等待主控系统的调用。
4 采用网络CCD的优点
首先,图像包含的数据量非常大,在短时间内传输多帧图像会出现网络堵塞现象,造成图像的丢失或传输错误,降低系统的可靠性,而该设计方案能有效避免这种现象;其次,该系统采用三层网络设计,控制底层设备很多,位于网络的较高层可靠性越高,也能降低网络传输的负担;再次,系统要求简化设计,通过一个光纤收发器连接到现场交换机,成为现场以太网络上1个结点,还可以减小由于系统的电磁干扰,避免影响图像的质量;最后,采集的数据可以直接通过光纤网传输给主控计算机,而不用通过FEP控制FEP,需要图像时可以下指令给网络CCD。故将网络CCD作为一个智能终端,可以提高系统的可靠性和实时性。
激光参数测量系统基于网络架构的设计对网络CCD要求有所提高,根据系统三层网络架构,所选CCD必须具有网络接口。远场CCD和监漂CCD采用北京微视公司的SG680DAM,近场CCD采用日本JAl公司的TM一2040GE,科学级CCD采用重庆港宇SGl024。
5 结 语
在试验过程中,网络CCD通过1 000 MHz交换机连接到以太网,如果采用100 MHz交换机,将无法识别CCD。CCD图像采集系统采用基于网络架构的设计方法,将网络CCD作为一个智能终端与以太网连接,独立完成图像的采集和处理,这样,就使得控制系统具有灵活性,能减轻控制FEP的负载,提高系统的可靠性与可维护性。
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)