基于网络技术的CCD图像采集系统研究
摘 要:CCD是一种将光信号转变为电信号的器件,适用于精确控制。在神光原型系统中CCD图像采集系统在使用过程中出现了数据拥塞等问题,改进的CCD采集系统的总体设计采用基于网络架构的思路,用带有千兆以太网的数据接口的网络CCD作为一个智能终端直接与工业以太网连接,并且只有有权限的计算机才可以访问CCD,使得系统成为一个控制简单可靠、智能化的系统。试验证明采用该设计方法可以提高系统的运行效率和可靠性,解决了网络拥塞的问题。
关键词:CCD;以太网;精确控制;网络技术;FEP
电荷耦合器件(Charge Coupled Device,CCD)是由一种高感光度的半导体材料制成,能把光线转变成电荷,通过模/数转换器芯片转换成数字信号,数字信号经过压缩后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想象来修改图像。
CCD由许多感光单位组成,通常以百万像素为单位。当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
CCD实现了非电量的电量测量,同时它还具有体积小、重量轻、噪声低、自扫描、工作速度快、测量精度高、寿命长的特点,因此受到人们的高度重视,在精密测量、非接触无损检测、文件扫描与航空遥感等领域中,发挥着重要作用。
l 系统概述
该装置是国家重要研究项目,主要由主控系统、服务子系统、底层控制系统组成,图像采集与传输系统是该装置底层控制系统的一部分,主要实现光束自动准值、图像分析以及对某些重要位置的视频实时监视、自动记录和回放检索。图像采集与传输系统由步进机构、光学系统、CCD、准值前端处理器、现场控制中心等组成。该系统中共有3种不同类型的CCD,分别是科学级CCD、准直CCD、大靶面CCD。通常科学研究上使用的CCD称为科学级CCD,科学级CCD既用于近场图像的分析又作为自动准直的测量点,准直CCD主要作为自动准直测量点,大靶面CCD主要用于视频的实时监视。
2 系统设计
该系统是在原型系统的基础上优化改进的。原型系统中采用普通CCD,带有图像采集卡和网卡的工控机连接到100 Mb/s光纤网上,工控机同时也通过运动控制卡控制步进电机的运动,CCD是步进电机的负载,通过步进电机的调节实现CCD的准值。当系统准值时。主控向控制层发送采集图像命令,工控机上的图像采集卡通过CCD采集数据,并进行图像处理,将处理后的图像传给准值FEP(Fronted―End Process),准值FEP计算准值中心并确定步进电机的脉冲数并将该脉冲术通过运动控制卡驱动步进电机运动来实现准值。实现监视功能时将采集的图像处理后通过以太网传输给主控计算机。系统运行时网络中数据传输量大,传输的路程较长,同时,所有的数据都是通过工控机上的网卡传输的,一旦网卡、工控机、FEP任何一个出现故障,则这个控制节点的所有数据都将丢失。
模块内的CCD一方面为参数测量系统的数据测量提供原始图像,另一方面也为自动准直系统完成自动准直提供图像。针对该项目中CCD采集系统的设计依据总体的设计规范、控制系统的总体框架和试验得出的结论以及原型系统工作中出现的问题,改进的CCD采集系统的总体设计思路是基于网络架构。将普通CCD改为网络CCD直接连接到工业以太网,同时网络CCD自带图象处理功能,所有的控制FEP通过主控系统授权均可访问该CCD。
PLC因其可靠性高、功能强大、使用方便、编程简单、抗干扰强等优点在工业控制领域内得到了广泛的应用,而德国倍福PLC接线简单、可靠性高、成本较低、实现简单,故将原型系统中控制步进电机的运动控制卡改用倍福PLC。
工业以太网,是指其在技术上与商用以太网(IEEE802.3标准)兼容,但材质的选用、产品的强度和适用性方面应能满足工业现场的需要,即在环境适应性、可靠性、安全性和安装使用方面满足工业现场的需要。工业以太网的优点表现在:以太网技术应用广泛,为所有的编程语言所支持;软硬件资源丰富;易于与In―ternet连接,实现办公自动化网络与工业控制网络的无缝连接;可持续发展的空间大等。因此在控制底层采用了工业以太网以满足数据传输的需要。
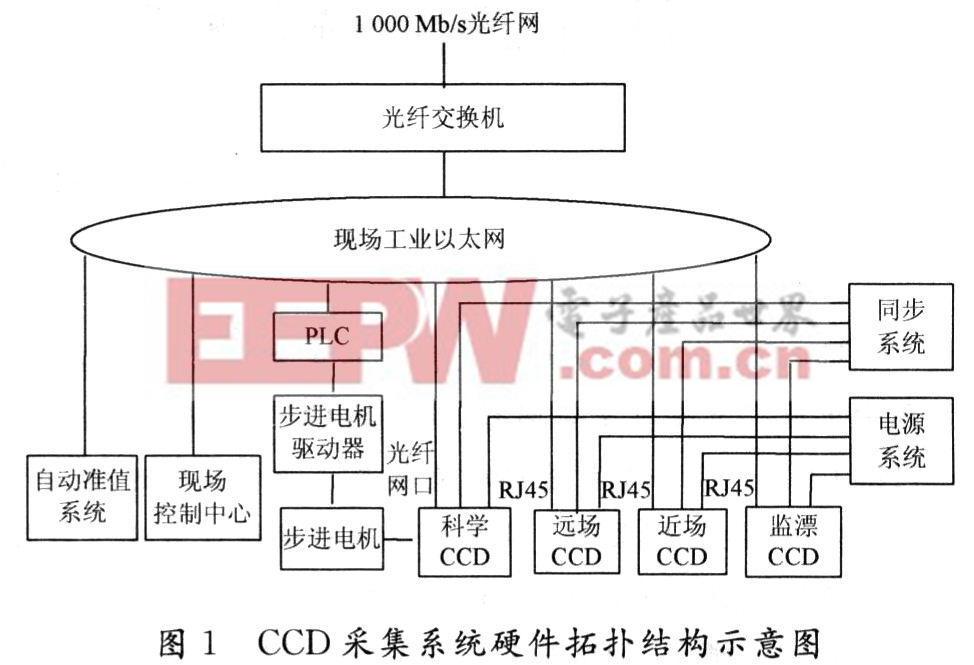
图1是系统连接的结构示意图,步进电机的负载是CCD,CCD是可以向x,y轴方向移动,故一个CCD需要两个步进电机来控制。如图1所示,所有的CCD直接连接到现场的工业以太网,PLC、自动准值FEP和现场控制中心也直接连到工业以太网,CCD与同步系统以及电源管理系统连接。远场CCD和近场CCD都是准值CCD,监漂CCD是大靶面CCD。
对CCD的IP
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)