基于DDS技术的动态偏振控制器驱动电路研究
引 言
偏振控制器是一种重要的光器件,在光纤通信和传感领域都有着广泛的应用。在光纤通信系统中,准确地控制光纤中的偏振态,关系着系统的稳定性和数据传输的误码率。然而在消偏型光纤陀螺中,准确测量光的偏振度也是保证光纤陀螺精度的有效措施。因此,偏振控制器(PC)作为一种改变输入光偏振态的光器件是不可缺少的一种偏振控制器件,在PMD动态补偿、偏振度(DOP)测试等方面发挥着重要的作用。
但是在实际运用中,偏振控制器的半波电压与厂家给出的标称值并不完全一致,导致了使用的不便。因此在使用时需要有与之配套的驱动电路。但是,许多厂家并不提供配套的驱动电路,即使提供,价格也昂贵,在实际工程开发中不能达到最佳性价比。因此,自主研制DPC的驱动电路是很有必要的。
本文以光纤挤压型偏振控制器为研究对象,运用邦加球图示法分析了其工作原理,并介绍基于DDS技术和FPGA的动态偏振控制器驱动电路的工作原理、系统结构及软、硬件设计。测试结果表明,设计实现了驱动电路的预定功能,生成了4路频率幅值均可调的正弦驱动信号。
1 DPC的工作原理
这里研究的光纤挤压型偏振控制器,其内部结构如图1所示。它由4个压电陶瓷光纤挤压器(称为挤压器F1,F2,F3,F4)组成,其方位角分别为0°,45°,O°,45°,各挤压器对应的驱动电压为V1,V2,V3,V4。分别在4个挤压器上加电压信号驱动,产生相应的压力挤压光纤,形成线性双折射,改变入射光波的相位差,从而实现任意偏振态转换。
由文献[3―5]和上述偏振控制器内部结构,可将挤压器中的四段光纤(分别称为d1,d2,d3,d4)看成不同方位角的相位延迟器。
(1)d1,d3可看成方位角为零的相位延迟器,只改变输入光的相位延迟而不改变其偏振方向,在邦加球上表现为输入偏振态绕S1轴的旋转。
(2)d2,d4可看成方位角为45°的相位延迟器,也即旋光器和相位角为零的相位延迟器的合成,不仅改变输入光的相位延迟,也改变其偏振方向,其偏振态变换在邦加球上表现为绕S2的旋转。
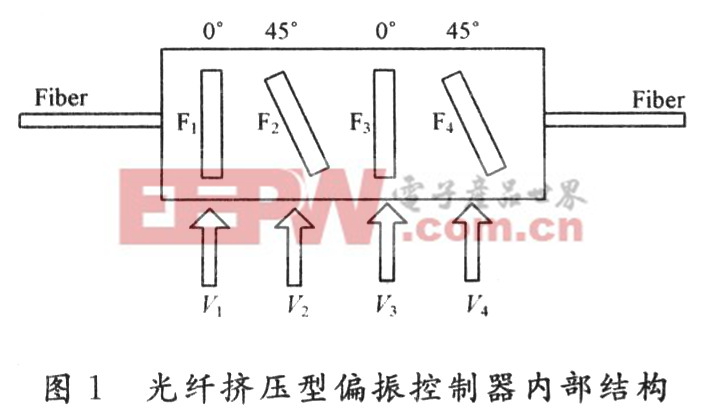
图2为d1,d2,d3,d4对偏振态变换在邦加球上的显示。如图2所示,在邦加球上,随所加电压的变化,d1或d3的输出光起始偏振态S绕S1轴顺时针旋转。d2,d4的输出光偏振态S'随所加电压变化在邦加球上绕S2轴逆时针旋转。
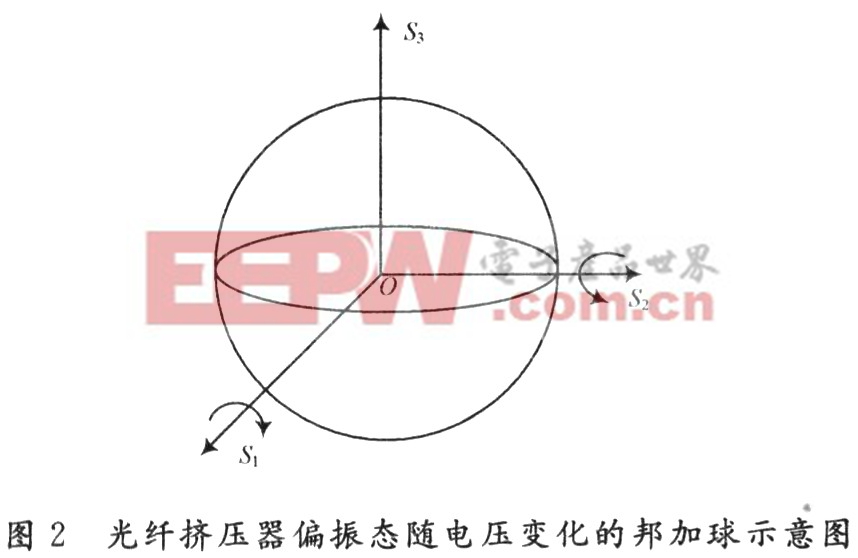
图2光纤挤压器偏振态随电压变化的邦加球示意图由此可知,只要输入光的偏振态与F1和F2的方向都不垂直,则输入光的偏振态都可以通过操作至少2个挤压器改变到任意一个偏振态。
2 DPC的驱动电路设计
DPC驱动电路的设计基于DDS技术,系统主要由Xilinx Spartan-3系列FPGA、数/模转换器LTC1668及宽带放大器LT1812组成。
2.1 DDS的基本原理
DDS的基本原理是基于采样定理。将相位累加器输出的相位码通过查表法映射成波形幅度码,经模/数转换和低通滤波后产生波形,其框图如图3所示。它主要由参考时钟fref、相位累加器、相位寄存器、波形存储器、数模转换器及低通滤波器等部分构成。
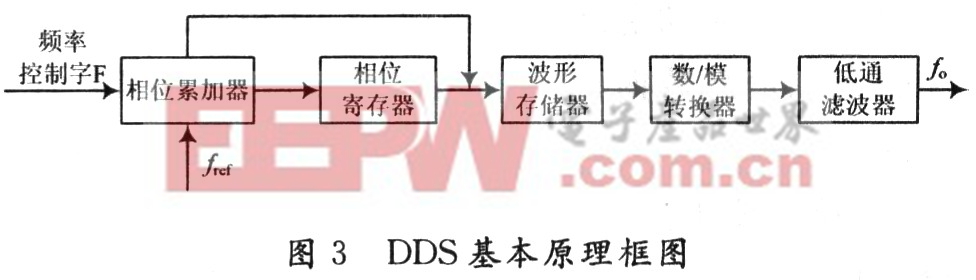
DDS工作时,它将在时钟脉冲的控制下,对频率控制字F用累加器进行处理,以得到相应的相位码;然后由相位码寻址波形存储器进行相位码――幅度编码变换后输出不同的幅度编码;再经过数模转换器和低通滤波器处理,即可得到由频率控制字决定的连续变化的输出波形。
2.2 硬件组成
DPC的驱动电路是基于偏振度测试系统平台(见图4)研制的。DPC用于将输入光扰偏后输出,再经检偏器和探测器将光强信息转化为数字量送人FPGA,FPGA对数据进行处理后再对DPC的驱动电压做出调整并输出,以达到完全扰偏的目的。
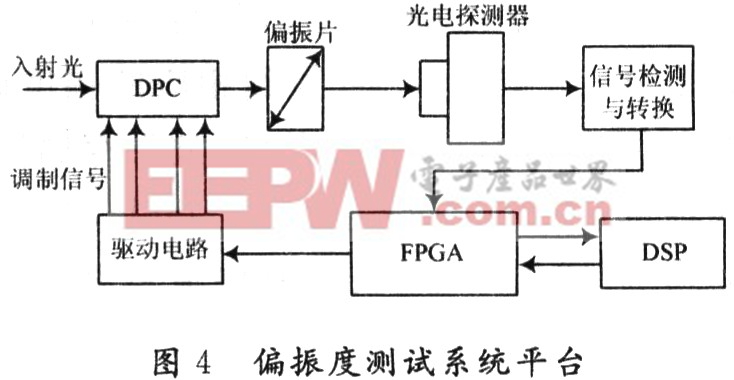
要实现完全扰偏,也即是让输入偏振态在一定时间内遍历各个偏振态。根据DPC的工作原理及实验尝试,测试系统使用4路正弦信号同时驱动4个光纤挤压器。根据DPC自身性质,所需提供电压最大值应小于2 V,正弦波频率应小于2 000 Hz。因此,驱动电路需要提供4路大于零的正弦波驱动信号,其峰值应小于2 V。且正弦波频率各不相等,均小于2 000 Hz。
驱动电路的硬件结构如图5所示,4路电压驱动设计均相同。采用16位高精度数/模转换器LTC1668,将FPGA输出的数据转换为模拟电流,再经运放LT1812将电流转换为电压。
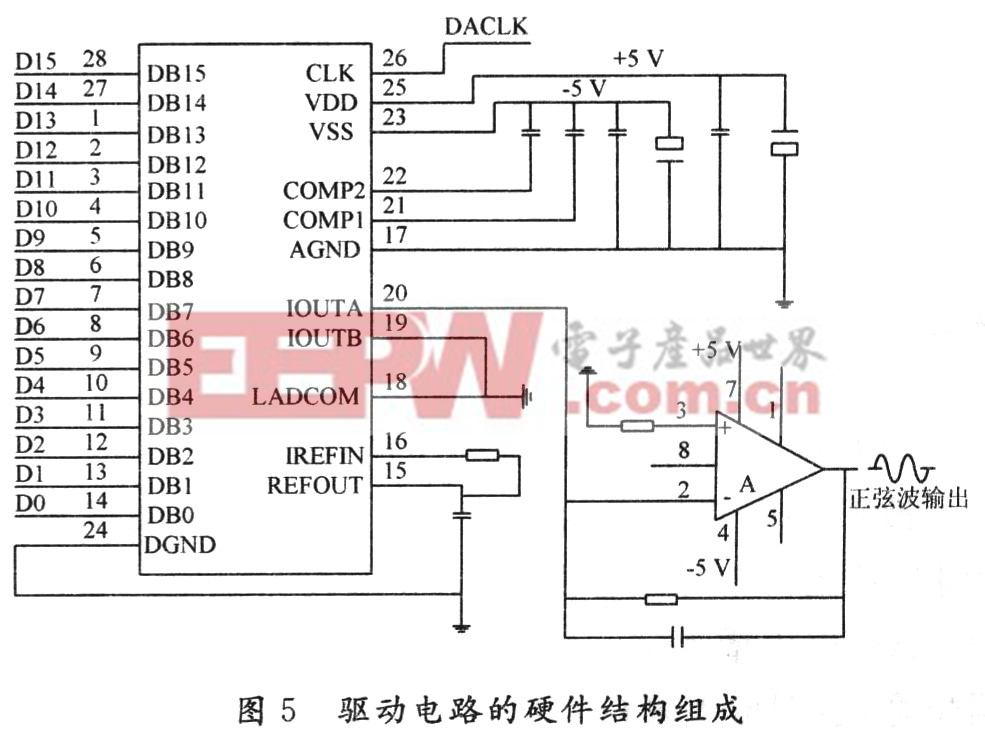
LTC1668工作在士5 V双极性电压供电情况下,其参考电压由内部提供,输出采用单端电流输出模式。宽带放大器LT1812完成电流一电压转换,最终输出符合要求的正弦信号。
2.3 软件设计
FPGA是驱动电路的控制核心。FPGA接收ADC转换的光强信息数据,并传送给DSP;再根据DSP计算所得的数据(即正弦驱动信号的频率f)判断是否符合要求,若符合要求则进入DDS子模块,得到幅度码并发送给LTC1668,以输出需要的正弦波。FPGA主模块流程图如图6(a)所示。
驱动 电路 研究 控制器 动态 DDS 技术 基于 FPGA 相关文章:
- 基于低压驱动RFMEMS开关的MEMS开关改进(11-09)
- 采用射频功率放大器驱动器的无线系统设计(04-10)
- 低压驱动的RF MEMS开关模拟设计(10-10)
- 多串流MIMO驱动 11ac射频前端迈向28nm(08-20)
- PCB设计后期检查的几大要素(04-20)
- 工业伺服驱动器的保护设计方案(06-21)