CPRI原理及测试解决方案(一)
数据宽度在4~l0b间可选,下行链路数据宽度在8~20b间可眩
定义超帧的目的是为CPRI协议增加控制和同步功能。每256个基本帧构成一个超帧。同时,每150个超帧可以构成一个无线帧。256个基本帧的第0时隙共同构成矩形的超帧控制结构。这个控制结构中,逐级嵌套的256个控制字按每4个字一组编为64个子信道。子信道序号Ns=0~63,每个子信道里的控制字序号Xs=0~3,一个嵌套里的控制字序号X=Ns+64×Xs,即每个子通道内的相邻时隙,相互间隔是64个基本帧长度。
同步字节是固定的控制字符k28.5,在8b,10b编解码中作为超帧和基本帧的定位字符。一旦解码模块发现了同步字节,可以根据基本帧与超帧的固定关系推导出时隙结构。超帧号和基站帧号用于与基站的同步。
CPRl支持两种不同类型的CM信道:
●CM信道选项1:慢速CM信道,基于高速数据链路控制(HDLC)。
●CM信道选项2:快速CM信道,基于以太网(Ethernet)。
慢速CM子通道用于传送控制和管理类的HDLC帧。CPRI规范定义的HDLC的链路速率最低达240kbit/s,最高达1920kbit/s。线路告警字节主要发送远端告警、信号丢失、帧丢失等物理层的告警信息。CPRI规范中同时定义了快速CM通道,快速CM通道的起始子通道由以太网指针P字节来定义。
2.3 CPRI工作流程
从整个CPRI的工作过程而言,最重要的是如图3所示启动状态机的启动过程,不仅需要硬件支持,而且还要有软件的参与才能完成整个状态机的迁移过程。
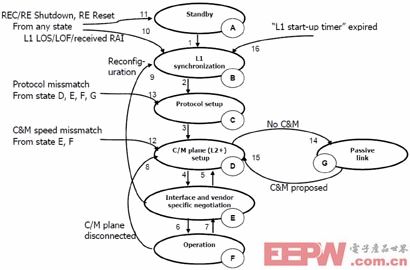
图3 CPRI的启动过程
同时,作为室内单元(IDU)和室外单元(ODU)在实现上也会有所不同,IDU是Master模式,负责主要参数的下发、协商等,ODU是Slave模式,负责对下发参数进行响应。而且Master和Slave模式在上面状态机的处理上有所不同。(
- Wi-Fi无线产品的研发与测试解决方案(05-29)
- 3G基站发射机性能测试与分析(04-20)
- MF-TDMA卫星通信网络仿真测试研究(04-11)
- IXIA引入第五代WI-FI标准测试新解决方案(05-27)
- 车载导航定位技术与测试方法(06-18)
- 智能手机成熟稳定性的关键——选对平台(04-01)