ADC驱动器或差分放大器设计指南
 | (34) |
公式34在过零点的导数(变化率)即最大变化率,它等于:
 | (35) |
其中dv/dt max是压摆率,Vp是峰值电压,f等于满功率带宽(FPBW)。推算FPBW:
 | (36) |
因此,在选择ADC驱动器时,重点要考虑增益、带宽和压摆率(FPBW),以确定放大器是否足够满足应用要求。
稳定性
关于差分ADC驱动器的稳定性考虑与运放是一样的,关键参数是相位余量。 虽然特定放大器配置的相位余量可以从数据手册中获取,但在实际系统中由于PCB版图中的寄生效应这个相位余量会有显著降低。
负电压反馈放大器的稳定性取决于其环路增益的大小和符号,A(s)×β。差分ADC驱动器要比典型的运放电路稍微复杂一点,因为它有两个反馈系数。在公式7和公式8的分母中可以见到环路增益。公式37提供了在反馈系数不匹配(β1≠β2)情况下的环路增益。
 | (37) |
当反馈系数不匹配时,有效反馈系数是两个反馈系数的简单平均值。当它们匹配并被定义为β时,环路增益可以简化为A(s)×β。要想使反馈放大器稳定,其环路增益不允许等于-1(相当于相位偏移-180°、幅度为1)。对于电压反馈放大器来说,其开环增益频率图上环路增益值等于1(即0dB)的点正是A(s)值等于反馈系数倒数的地方。
对于基本的放大器应用,反馈是纯阻性的,在反馈环路中不会引入相位偏移。在反馈系数匹配的情况下,与频率无关的反馈系数倒数1+RF/RG通常被称为噪声增益。如果将以dB为单位的恒定噪声增益与开环增益A(s)绘制在同一张图上,那么两条曲线的交叉点就是环路增益为1或0dB的地方。在这个频率点的A(s)相位与-180°之间的差值被定义为相位余量。为了稳定工作,这个相位余量应大于或等于45°。图19给出了RF/RG=1(噪声增益=2)时ADA4932的单位环路增益点和相位余量。
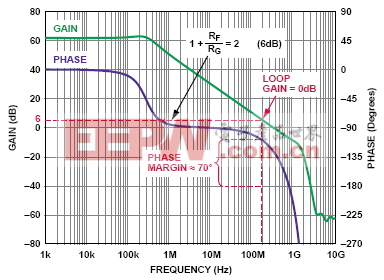
图19:ADA4932开环增益幅度和相位与频率的关系。
进一步观察图19可以发现,ADA4932在噪声增益为1(每个环路中100%反馈)时有约50°的相位余量。虽然让ADC驱动器工作在零增益有点不切实际,但这一结果表明,ADA4932可以稳定工作在小数差分增益(如RF/RG=0.25,噪声增益=1.25)。并不是所有差分ADC驱动器都能这样。最小稳定增益可以在所有ADC驱动器的数据手册中找到。
电流反馈ADC驱动器的相位增益同样可以从开环响应中判断。电流反馈放大器不再使用前向增益A(s),而是使用前向互阻T(s),并将误差电流用作反馈信号。带匹配反馈电阻的电流反馈驱动器的环路增益等于T(s)/ RF,因此电流反馈放大器环路增益幅度在T(s)= RF时等于1(即0dB)。这个点在开环互阻和相位图上很容易找到,定位方法与电压反馈放大器相同。注意,绘制电阻与1kΩ的比值能使阻值表示在对数图上。图20给出了RF=300Ω时ADA4927电流反馈差分ADC驱动器的单位环路增益点和相位余量。
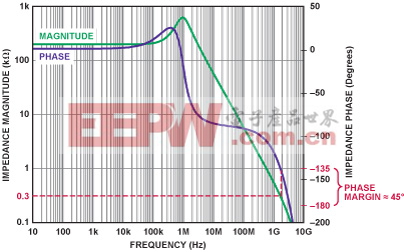
图20:ADA4927开环增益幅度和相位与频率的关系。
300Ω反馈电阻水平线与互阻幅度曲线的交叉点是环路增益为0dB的地方。在这个频率点,T(s)的相位接近-135°,
- 直接变频接收机设计可实现多标准/多频带运行(10-11)
- 基于蓝牙芯片的无线通信模块设计与开发(02-03)
- 无线通信网络设计与现场测试(10-10)
- WiMAX数据传输加密方案设计与实现(05-25)
- 高性能TD-SCDMA接收机的设计(03-15)
- 初步设计WiMAX射频系统(03-29)