气体压力闭环控制系统设计
摘要:由于高压气体注入密闭容器时的速度要求精确控制,需要一种响应迅速,且较为容易实现计算机精确控制的充气系统。该气体压力闲环控制系统由PC104 VDX6354微电脑和步进电机实现控制功能,基于VC++和Matlab混合编程,由PC机根据精密数字压力表实时传输来的数据建立气压预测模型,闭环控制步进电机,调节精密阀门的开度,从而确保工作气体的高精度恒压注入。在步进电机控制模块引入坐标系,成功解决电机的碰撞问题。
关键词:PC104;步进电机;闭环控制;混合编程
0 引言
气体压力的自动化测试和控制是一个古老而又不断更新的课题,随着自动控制和计算机技术迅猛发展,给气体压力控制技术带来了深刻的影响。精密气压的产生与控制技术应用越来越广泛,特别是应用于液压和气动设备的检验,对气压的控制精度和控制稳定性提出了越来越高的要求。目前,现代工业生产日益复杂化,为满足生产条件和产品精密的要求,必须不断改进信号采集和控制的方式方法,向更加快捷、高效、准确、实时以及远程控制的方向发展。气体控制是利用各种控制元件(各种阀、缸等)和控制器,组成控制回路,以进行自动控制。
在某型装备测试操作中,需要往高压气瓶中注入高压工作气体,高压气体在注入的过程中出于安全起见需要精确控制充气速度。因此,本文采用闭环控制系统通过计算机对气体管路进行实时控制,在装置运行过程中根据压力表反馈的数据,动态调节阀门的开启度,控制充气速度在合适的范围。
1 整体方案设计
对气阀的流速做出控制,最简单易行的方法就是改变进气时气流流通的横截面积,可以通过在进气道中设置一锥形活塞,通过精确控制锥形活塞的行程来改变进气道流通面积,而精确控制锥形活塞的行程可以通过步进电机带动丝杆传动系统,做出精确位移来实现。
整个闭环控制系统由PC系统、气体管路系统和步进电机系统构成。在VC++2005环境下,由PC系统控制压力表实时采集管路的压力值,实时数据经过Matlab的多项回归处理,得出压力的实时变化快慢来闭环控制步进电机调节精密阀门开度,实现气阀充气速度的自动控制。
1.1 硬件设计
系统以ICOP最近推出的一款功能齐全完美的PC104单板电脑VDX-6354为核心,主板采用标准PC104结构,小尺寸并拥有完整性的功能,运算时的稳定度高,执行速度快,功耗低,-40~+85℃的军工级工作温度。
步进电机控制系统选用RORZE系列,通过RS 232总线和电脑通信,包括RD-023MS驱动器、RC-002电平变换器和RC-233定位主控器、RM2414 S步进电机。该系列步进电机系统,以程序取代人的操作,配备功能强大的编码器,利用RD-023MS驱动器,不需要外接脉冲信号和驱动电路,通过程序指令控制电机实现正转、反转、加速、减速、查询、定位等功能。RC 233定位主控器可以有80,320,1,64,50,400几种细分,满足不同速度的需求。
压力表选用ACD-2精密数字压力表,它是一款高精度智能测量仪表,由压力传感器和信号处理电路组成。压力传感器采用进口传感器,性能优越,具有精度高、抗腐蚀、抗冲击、抗震动、高稳定性等优点,可靠性高。压力表通过RS 485接口与电脑通信连接,驱动和控制程序简单,气压表12 V直流电压供电。由于RS 485串行接口属于一种差分标准,允许1对双绞线上1个发送器驱动多个负载设备,RS 485通信多用在主从式多机通信中,但其作为一种半双工的通信方式,在1条通信电缆上挂许多设备时,一定要保证在总线上只有1台设备处于发送状态,其他设备一定要处于接收状态;而一旦同时2台设备都处于发送状态,必然会出现总线冲突的现象。针对上述问题,解决的关键是一定要控制好各台设备的接收与发送状态即RS 485接口器的收发状态,本系统中两个压力表工作时间不同步,可以避免这种收发冲突。
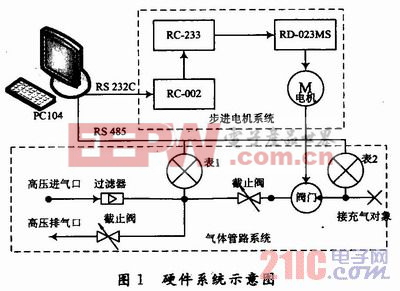
气体管路组件选用宁波星箭航天机械厂的过滤器、截止阀、阀门和导管,硬件系统示意图如图1所示。
1.2 软件设计
软件部分通过网络接口实现远程编程,在其他电脑上Windows XP环境下用VC++2005和Matlab混合编程,最后将可执行文件以静态库的形式移植到单板电脑上运行,分为主程序模块、硬件驱动模块、数据处理模块三个部分,后两个部分均以类的形式封装。VisualC++是Windows平台下强有力的高级编程语言,能够方便快速地开发出界面友好,执行速度快,易于维护升级的系统软件。然而Visual C++只提供了一些基本的数学函数库,当遇到复杂的数值运算时,重新编写程序代码延长软件开发周期,增加软件开发成本。Matlab拥有独立的数学函数库,包含有大量优化了的数学函数,同时提供了对C++语言的函数接口,用户可以方便地在VC++的集成开发环境中调用。但Matlab的应用程序接口并不是很强大,它不能传输除了数值之外的其他数据,而VC++却具有强大的程序接口,能传输任何数据,但其进行复杂计算的能力不是很强。因此,若将两者结合起来,协同工作,必将提高软件开发效率。程序流程图如图2所示,初始状态把阀门定在完全关闭的状态,规定电机逆时针为正。
- 基于GPS的数据采集系统的研究(01-15)
- 无线射频识别技术在规模化奶牛场的应用(05-14)
- 瑞风智能一卡通社区解决方案(05-15)
- 射频能量采集技术(07-02)
- 无电池式低功耗蓝牙(BLE)Beacon:采用能量采集技术的BLE(05-31)
- 滤波算法知多少?各种数字滤波算法的优劣分析(07-14)