基于单点输入多点输出系统的模态参数测试系统设计
摘要:为了检测装备的机械结构损伤情况,采用模态参数进行识别分析。设计了一种用于单输入多输出方法的模态参数测试系统,给出了系统硬件结构及部分软件。该系统采用了多控制器方案,能够按照使用要求输出激励和并行采集数据,实现数据的海量存储。该系统具有通用性,可以用于多种用途。
关键词:模态分析;硬件结构;激励方法;并行采集
0 引言
模态分析是在对结构进行实际测试的基础上,采用实验与理论相结合的方法来处理工程结构的动力学问题。随着某装备减重和确保可靠性要求,必须对其进行模态分析。在确定单输入多输出方法的模态分析方法基础上,需要设计相应的测试系统。该系统要求结构上能够满足被分析的对象,即能在装备平台上施加相应的激励,可并行采集结构的振动加速度,同时实现数据的即时存储。本文根据这一要求,设计了相应的测试系统。该系统以PC机为主机进行操作,以ARM控制器为执行机构,对输出和采集过程进行控制,输出形式是激振力,输入信号是加速度。
1 单点输入多点输出模态参数测试
单点输入多点输出方法在实验时,激励点是固定的,且可以同时测试多个点的响应。该方法测试效率较高,广泛用于中型机构的实验模态分析。由于同时测量多个点,传感器的质量和要小,以减少附加质量对结构特性的影响。激励方法可以采用锤击法或激振器激励法。本文采用了激振器激励法。激振器激励方法较好,可以克服锤击法容易引起模态遗漏的问题。
该方法的系统原理结构如图1所示。

2 测试系统总统结构设计
根据系统测试要求,本文设计了模态参数测试系统。该测试系统由PC机、输出控制器、激振器、数据采集控制器、调理电路和多个振动采集传感器组成,如图2所示。
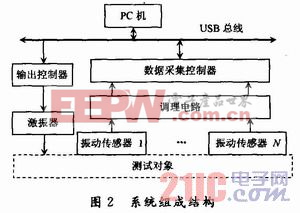
PC机作为该系统的主控计算机,用于向采集设备控制器发出控制命令(如开始、结束等),保存和分析数据,并产生激振器所需的波形数据。输出控制器接收波形信号,将波形数据转换成模拟信号发送给激振器。激振器根据波形信号产生相应的激振力作用于被测对象。振动传感器感受测试对象的振动,产生电荷信号,调理电路将传感器的电荷信号转换成电压信号,发送给数据采集控制器。数据采集控制器用于采集控制,可以接收PC机发出的命令,同时对采集过程进行控制。
振动传感器要求测量试验响应的传感器除了体积小、重量轻,还必须具有低频灵敏度高的特点。同时,要求传感器有较好的线性度和相位特性,以便用两个传感器的信号相加或相减。目前,用于模态试验的传感器有加速度计和应变电桥两大类。本文采用压电式加速度传感器,型号为DH130,灵敏度为1.08 pC/m·s2,工作频率范围为0~104Hz,横向灵敏度小于3%,重量为9 g,安装方式为磁座吸合。输出控制器采用USB总线输出卡,可以输出两路模拟信号。
3 激励信号的产生
激励信号的类型根据模态分析方法的不同而不同。该系统采用了随机子空间作为模态分析方法,该方法要求输入信号为白噪声信号,因此需要由PC机产生白噪声序列给输出控制器。
在PC机上,采用LabVIEW软件产生白噪声序列。其基本思想是由随机数产生函数产生(0,1)区间内的随机数,将随机数乘以一定系数后,使其符合输出控制器要求的范围,定时送往输出控制器。其程序结构如图3所示。

程序执行产生的随机数序列送往输出控制器后,产生的信号如图4所示。

4 数据采集控制器
数据采集控制器以ARM控制器为核心,其外围电路包括USB总线控制器,数据采集控制电路,时钟电路,存储电路等。
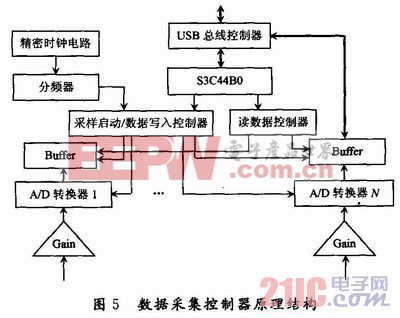
其基本结构如图5所示。在该控制电路中,ARM(Advanced RISC Machine)作为总控制器,接收上位PC机命令,向采样电路发出执行采样命令,向分频器写入数据,确定采样速率。当采样完毕后,发出停止采样命令,并将数据传送到PC机。该ARM芯片选用S3C44B0。USB总线控制器为MC34825,用于和上位PC机进行数据和指令传输。精密时钟电路是采样时间控制电路,其发出的时钟信号经可编程分频器(8254)分频后送往A/D转换电路作为启动下一次采样和向存储器写入已采样数据的信号。
在采样启动/数据写入控制器中,包括采样允许/禁止控制电路,读写控制电路。允许/禁止控制电路由ARM控制器控制其使能,决定信号的通过与否。读写控制电路由加法器和控制逻辑组成,加法器输出作为Buffer的地址信号,当时钟信号来到,地址自动加1,并向Buffer发出写入数据命令。该电路结构原理如图6所示。

5 应用
采用本文设计的系统,对某装备结构进行了模态分析实验,获得了部分加速度数据,如图7所示。

经应用证明,该系统能够完成所要求的模态参数测试功能,能对被
RM 相关文章:
- Beamforming技术提高WIFI基站覆盖性能(02-25)
- 揭秘TI移动AP中ARM核的应用演变(04-02)
- 单芯片智能手机解决方案给力TD移动市场(04-19)
- 基于ARM平台的RFID中间件系统设计(05-16)
- 1800MHz:LTE全球漫游的最佳选择(08-13)
- Cortex-M0+的RFID读卡器模块设计(11-03)