台风预警和搜救系统研究
引言
目前海上台风预警和搜救问题已越来越成为急需解决的问题,系统终端和后台监控系统只通过短消息等方式实现通信联系,有限的数据传输制约了终端功能的扩展,无法解决无线视频传输所需移动通信网络的带宽瓶颈问题,从而导致对海上台风预警和搜救始终不能普及。为此,本文设计了一种基于GPS/3G/GIS的多功能台风预警和搜救系统。
1 系统总体设计
系统整体结构如图1所示。
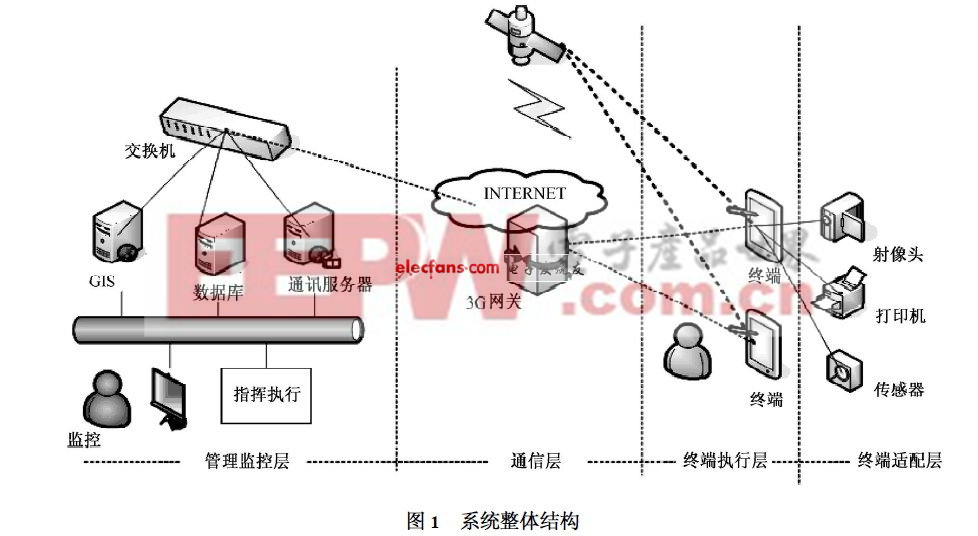
1.1 终端适配层
包括高速摄像头、打印机和传感器等可扩展的外部设备。
1.2 终端执行层
即船舶移动终端,是系统的基础,主要完成视频监控功能及GPS定位数据、报警信息和服务请求信息的采集、传送及监控中心控制、配置命令的接收和执行等。
1.3 通信层
通信层是整个系统的沟通核心,实现每个移动船舶的位置信息、状态信息、报警信息向中心的发送以及中心向移动船舶发送指示、控制命令的发送。
1.4 管理监控层
管理监控层是系统的门户,其内部通过千兆局域网将通信服务器、数据库服务器和监控台互连,实时接收处理来自受控船舶的各种信息,并提供友好的人机界面。监管中心系统包括通信接口、GIS地理信息模块、中心数据库服务、电子地图数据等多个子系统。监控层的功能主要有电子地图的显示和操作、船舶跟踪显示、船舶数据查询、船舶数据管理等。
2 系统软硬件方案设计
2.1 硬件设计
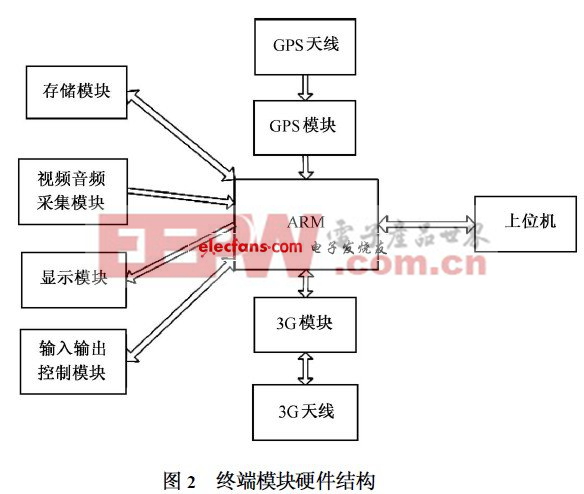
系统终端硬件采用嵌入式开发平台,主要模块有处理器,3G通信模块,GPS信号接受模块,手柄控制模块,液晶显示模块,摄像头,电源模块,存储模块等组成。在处理器的选择上,采用ARM芯片,它强大的运算速度和数据处理能力以及便于进行嵌入式系统开发,能够对视频等信息进行处理。
同时,支持同步录音功能。视频编码模块采用基于H1264标准的编码设备,为嵌入式结构,具备延时少、体积小、可靠性高等特点。传输模块负责将经过编码的数据发送出去。一张3G卡对应一路通道,根据数据量大小,可分别采用单路或多路捆绑方式发送。数据以无线方式发出后,经移动通信基站进入3G网络,并进一步通过公网传输至该系统监控中心局域网内。其结构如图2所示。
2.2 软件设计
由于嵌入式系统的硬件资源有限,因此嵌入式Linux操作系统都是针对具体的应用通过配置linux内核和嵌入式C库定制的,使得整个系统能够存放到容量较小的Flash中。事实上,Linux的动态模块加载,使Linux的裁减极为方便,高度模块化的部件使添加也非常容易。基于此,在笔者实现的平台上,使用的操作系统是对Linux进行了定制的RTlinux。
上行数据主要是系统终端向管理监控中心传输数据,主要信息有船舶的实时位置、速度、状态、周围环境数据和报警数据等;下行数据是由监控中心向船舶终端传输的数据,主要为指挥信息、指令信息等。因为上下行数据内容及数据量有很大的不同,因此采用不同封装格式以迅速地区分出信息类型,从而提高系统通信效率。按通信协议封装的数据利用3G网络发给通信服务器,通信服务器软件,通过接口获取数据包,判断数据的合法性,若是合法数据则进行协议解析,提取船舶的GPS定位数据或报警数据等,如若不合法则丢弃。合法数据中的属于报警信息和紧急故障信息需要优先处理,给出警报信号,其他的状态和回复信息通过数据库操作提交到后台数据库中,GIS地理信息模块定时地从数据库读取经纬度数据进行坐标转换和投影变换后,将其转换到电子地图所采用的平面坐标系统中的坐标,然后在电子地图上实时显示船舶状态。客户端应用软件将获得的命令信息和调度信息发送给通信服务器,通信服务器遵循统客户端各模块通信协议进行协议解析,判断数据合法性之后,合法数据按下行数据格式组帧打包后经3G网络发往移动终端,终端接收并解析数据包,做出响应。监控终端和监控中心服务通信实现后,监控中心的监控软件即可在此基础上利用GIS地理信息模块实现船舶的动态跟踪及其他应用如轨迹回放、地图操作等。
船舶的动态显示需要用到ARCMAP的动态图层来实现,这样可以加快绘图显示速度。船舶用点图元来表示,点图元在地图中的位置就是GPS定位的经纬度数据,根据GPS接收数据的频率来实时刷新该图层,就达到了船舶的实时定位了。移动终端每隔几秒获取船舶的经纬度数据,刷新动态图层即可在屏幕上可以看到船舶实时显示。
3 后台监控设计
根据系统设计要求和目前GIS系统开发的趋势,该系统采用的是组件式GIS和万维网GIS(Web2GIS)结合的开发模式,因为组件式GIS基于标准的组件式平台,各个组件之间不仅可以进行自由、灵活的重组,而且具有可视化的界面和使用方便的标准接口,支持ActiveX规范;具有
- 基于TD-LTE的移动互联网研究(03-01)
- RFID在Rifidi中的仿真研究(06-14)
- 高频和微波功率基准及其应用研究(04-12)
- 基于RFID技术的后方仓库管理系统研究(08-14)
- HSDPA无线网络合/分载频规划方案的研究(06-13)
- MACH 2系统TDM通信接口的研究(05-20)