某光电跟踪产品双DSP系统RS422通信设计
摘要:以某光电跟踪产品双DSP系统为例,详细介绍了RS 422通信设计。该系统设计选用Maxim公司提供的Max490ESA作为接口芯片。给出了其硬件接口原理图,并分别从DSP和PC机两方面详细介绍了RS 422通信程序的设计,具体给出了设计思路和数据结构。通过内外场试验,验证了该系统RS 422通信设计的可靠性及便捷性。
关键词:双DSP;RS 422通信;位流;数据结构
0 引言
信息社会的发展,在很大程度上取决于信息与信号处理技术的先进性。数字信号处理技术的出现改变了信息与信号处理技术的整个面貌;而数字处理器作为数字信号处理的核心技术,其应用已经涉及到设计信号处理的各个领域,成为电子系统的心脏。某光电跟踪产品设计了基于TMS320C6201B和ADSP2187L的双DSP的信息处理平台,它提高了对信息的识别处理速度,具有实时性好、控制精度高、抗干扰能力强等特点。一般情况下,可利用JTAG口对DSP进行调试,然而,在整机情况下,这种方式就不太适用了。因而,在本系统中设计了RS 422接口,大大方便了远程调试和整机调试。
1 RS 422通信设计
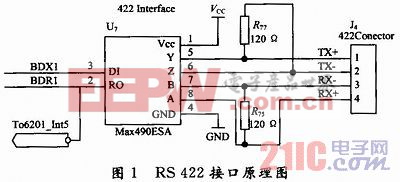
本系统选用Maxim公司提供的Max490ESA作为接口芯片,它具备高速、低功耗等特点。图1所示为RS422接口原理图。
该通信设计的接口程序包括两个部分:DSP上的通信程序设计和PC机上的通信程序设计。
DSP的通信程序设计主要是调用INT5和TIMER0中断实现的。RX信号线挂在TMS320C6201的INT5脚,当6201检测到下跳时,引发一个中断,在中断程序中,立即将ADSP2187前端的数据采集到DSP的片内,然后开放TIMER0中断处理程序。中断程序负责将数据发给PC机。
PC机的RS 422通信程序采用C++Builder编写,为多线程程序。利用了专用的RS 422通信控件Vcomm32来实现通信。
1.1 DSP上的RS 422通信程序设计
DSP上的RS 422通信程序是一种有限状态机,它利用上层协议将位流进行传输,具体设计如下:
1.1.1 位流的形成
发送过程:RS 422是四线制的差分电平通信标准,在本系统中,TMS320C6201B的McBSP1用作通用I/O口,将MeBSP1的7根本来用作同步通信用的数据与控制线,现设置为通用I/O线。
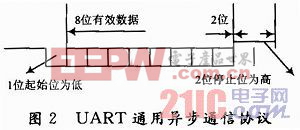
通过将TMS320C6201B的McBSP1接口的DX引脚置高与置低实现发送一位位的数据流,通过读取RX引脚上的电平信号来接收数据位流。位流的速度与PC机上接收与发送流的速度一致。位流的格式遵循标准异步通信协议(UART),本系统中,设定为1位起始位,8位数据位,2位停止位。由于TMS320C6201B上没有带UART通信口,只能用软件通过通用I/O引脚模仿UART。位流的节奏由TMS320C6201B的定时器0定时周期控制。图2所示为UART通用异步通信协议。
接收过程:RS 422传输线Rx+、Rx-经过MAX490ESA422接口芯片后,变成5 V CMOS电平信号Rx。Rx接至TMS320C6201B的两个地方,一是TMS320C6201B的McBSP1的Rx脚,另外还同时接至TMS320C6201B的INT5脚。接收的过程如下:一旦PC机发出一个8位数据,PC机首先要发送电平为低的起始位,这时将引起Rx脚由高到低的跳变,TMS320C6201B的INT5脚将感受到这一电平的跳变,这将引发TMS320C6201B的一次电平中断,用来提示TMS320C6201B,请准备接收PC机上的数据。在INT5的中断处理程序中,首先关掉INT5脚电平中断,以防后来还没有接收完8位的数据位流上的电平变化再次引发不希望出现的中断,然后退出中断。TIMER0开始计数到给定的周期时,引起了TIMER0的定时中断,TIMER0判断是否收满8位,如果没有,则读取McBSP1脚上的Rx信号,将其移入到接收缓冲区;如果接收满了8位,则根据接收缓冲区接收到的字的意义以及DSP其他参数做出处理,当然,收满8位,TIMER0定时将打开INT5中断,复原系统其他状态,为下一次接收完整数据做准备。这样就完整地接收到了PC机上的一串完整的8位数据。
1.1.2 上层通信协议
位流形成后必须能识别出位流中包含的意义,或者建立一种DSP与PC之间的通信协议或通信状态机,确保DSP能够识别出PC机发出的命令字,同时PC机也能正确接收包含着特别含义的位流。
该通信协议要实现以下功能:
(1)确保DSP与PC机能正确地握手。当握手不成功时,要有相应的错误处理机制;当握手不成功的次数太多时,必须停止握手,提示操作人员做相应的处理。
(2)在握手成功后,DSP能够根据PC发出的命令,做出相应的响应。
(3)协议应该简单,不太复杂,扩展容易。
为了达到以上设计目的,本系统在DSP上设计了如图3所示的RS 422通信状态机。
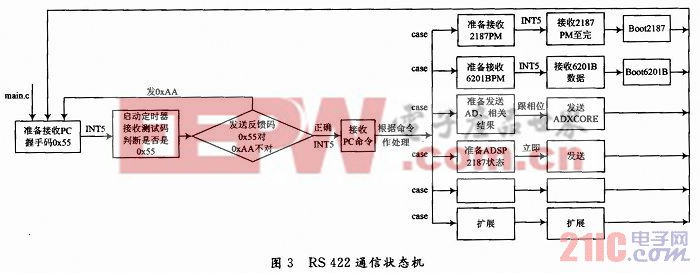
其基本过程是:当DSP启动后,进入主程序,首先将通信状态机置于准备接收PC机握手码状态,一旦收到PC机发出的8位数据,判断是否是8位握手码,如果是则将通信
RS422 通信 设计 系统 DSP 跟踪 产品 光电 相关文章:
- USB到多路RS422转换器的电路实现(11-11)
- 如何选择RS232/RS485/RS422转换器(09-08)
- 具集成可通断终端的坚固型3.3V RS485/RS422收发器(03-02)
- 无线通信领域中的模拟技术发展趋势(蜂窝基站)(09-22)
- 新一代移动通信系统及无线传输关键技术(06-19)
- 蜂窝移动通信基站电磁辐射对人体影响的探讨(04-10)