基于DDS的单脉冲体制雷达目标模拟的实现
摘要 目标模拟器可以辅助雷达系统进行整机调试并帮助进行操作培训。利用DDS芯片AD9857设计了一种单脉冲体制雷达的目标模拟器。通过数字交汇技术将模拟目标和雷达扫描波束进行交汇,计算出DDS芯片的控制参数。通过DDS芯片直接产生两路所需的中频信号,提出利用连续波校准和波形存储技术,解决差波束正负号确定的问题。在某雷达调试过程中,验证了该目标模拟器的有效性。
关键词 单脉冲;目标模拟;比幅测角;和差波束
单脉冲体制雷达能在一个回波脉冲内获得关于目标位置的全部信息,这使雷达在工作过程中节约了大量的时间和能量,所以得到广泛应用。单脉冲测角方法主要有3种:幅度比较法、相位比较法和幅度相位比较法。目前多数相控阵雷达采用的和差波束测角就是一种幅度比较单脉冲测角方法。
在幅度比较单脉冲中,天线接收的目标回波信号在和、差支路中形成和、差信号。和波束回波信号主要用于目标检测和作为相位基准以确定信号正负,差波束回波信号主要用于测角。为较好地模拟和差波束的幅度以及之间的相位特性,文中通过数字交汇技术、连续波校准、波形存储技术解决和差波束幅度、差波束正负号确定的问题。在某雷达调试过程中,验证了该目标模拟器的有效性。
1 实现过程
1.1 系统组成
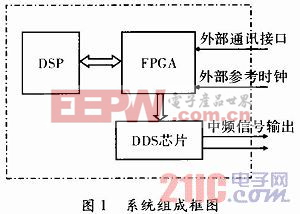
系统采用数字信号处理器(DSP),直接数字合成器(DDS),可编程逻辑器(FPGA)的体系结构,并配以必要的相关电路完成。DSP是系统的控制主机,主要完成目标飞行轨迹的建模,目标实时与雷达扫描波束的交汇比较,运算目标回波的幅度、多普勒频率,形成DDS的控制字;FPGA为Altera公司芯片,主要完成DSP的地址译码、通讯接口、存储雷达波形、产生DDS串口操作时序;DDS为AD公司AD9857芯片,用于在雷达时序的控制下,将波形数据上变频形成所需的中频模拟信号。组成框图如图1所示。
1.2 工作原理
外部系统将模拟控制命令和雷达扫描波束通过外部通讯接口输入FPGA,并产生中断信号,DSP在这个中断信号的触发下产生硬件中断,读取控制命令。当DSP收到开始工作命令后,模拟目标按照建立的航迹飞行,并与送来的雷达波束进行实时交汇和计算。当目标与雷达波束交汇成功时,计算交汇的幅度、多普勒频率、距离等。将算出的数据经FPGA数据锁存器,DDS时序模块,距离延迟器等处理后送至DDS芯片。
在雷达时序脉冲信号的控制下,形成动态目标中频模拟信号送给信号处理器。工作原理如图2所示。

1.3 数字波束交汇
当DSP收到开始工作的命令后,模拟目标按照建立的航迹飞行,并与送来的雷达波束进行实时交汇。波束交汇示意图如图3所示。
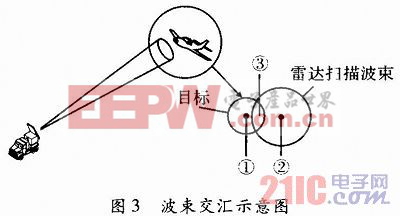
图3中,①为目标中心位置;②为雷达扫描波束中心位置;③为目标与波束交汇公共区域。当雷达扫描波束与目标交汇成功以后,可以根据式(1)计算目标的幅度
其中,(sinA,sinE)为目标方位和高低角的正弦;(sinAt,sinEt)为雷达波束方位和高低角的正弦,(sinθA0.5,sinθE0.5)为半功率波束方位和高低角的正弦,N为目标幅度量化值。
1.4 和差波束幅度的实现
如上所述,当目标与扫描波束交汇成功,通过公式计算图3中③的区域目标的幅度,该幅度即为和波束的幅度。然后根据公式计算出目标中心位置①与扫描波束中心位置②之间的角度偏差
△φ=arcsin(sinAt)-arcsin(sinA) (2)
式中,△φ为目标中心位置与扫描波束中心位置之间的角度偏差;sinA为目标方位角的正弦;sinAt为雷达波束方位角的正弦。
再根据目标①与雷达扫描波束②之间的角度差,运用单脉冲测角差斜率反算出差波束幅度
F(△)=Km·F(∑)·△φ·md (3)
式中,F(△)为波束交汇差幅度;F(∑)为波束交汇和幅度;Km为单脉冲测角差斜率;md为修正因子。
1.5标差波束的正负号的实现
AD9857作为一款窄带正交数字上变频器件,基本满足一般雷达的中频信号要求。但该芯片在上电初始化时无法设置波形输出的初始相位,以及多个芯片同时工作时,芯片之间没有相位同步信号,每次上电后各自的初始相位不同。这给正确模拟差波束相对于和波束的相位关系带来了困难。
为正确模拟差波束相对于和波束的相位关系,主要采取两种措施:
(1)两路DDS芯片上电后,由外部系统通过外部通讯接口发送校准工作命令,当DSP芯片收到该命令后,置DDS芯片为中频连续波模式输出中频连续波给信号处理器进行校准,把两路芯片的相位校准在一起。
(2)通过步骤(1)的方法可以去除两路芯片之间的相位差。为正确表示差波束相对于和波束的相位关系,通过在原始雷达信号上加一个初始相位的方法来实现,当正号时设为初始相位为0°,当负号时设置为初始相位为180°。设雷达基带信号为
式中,A为信号的幅度;φ(t)为雷达基带信号波形相位;θ0为雷达基带信号波形初始相位。
用Matlab进行仿真,仿真结果如图4和图5所示。
目标 模拟 实现 雷达 体制 DDS 脉冲 基于 相关文章:
- 国际电联发定调全球电信业2020年发展目标(06-18)
- 基于机器视觉的物体包装盒实时贴标系统设计(05-17)
- 采用卷积调制与间歇采样的多假目标干扰方法(10-27)
- 关于OTN目标架构在网络优化应用中的探讨(09-03)
- 什么是恢复时间目标(RTO)(06-02)
- 无线通信领域中的模拟技术发展趋势(蜂窝基站)(09-22)