基于车载雷达系统的波导缝隙天线方案设计
O 引言
波导缝隙天线自上世纪中叶以来有了很大的发展,广泛用于地面、舰载、机载、导航等各个领域。由于缝隙阵列天线对天线口径面内的幅度分布容易控制,口径面利用率高,体积小,易于实现低或极低副瓣等特点,因而使其获得广泛使用。在波导缝隙天线的研究方面,许多学者对缝隙天线理论和实验进行了大量基础性的研究工作,因而波导缝隙天线的理论越来越成熟。本文所设计的就是基于车载雷达系统应用的一种小型波导缝隙天线。该天线要求在水平面内具有宽波束的特点,能够覆盖比较宽的范围,从而更有效地提高车辆的战场生存能力。天线需要满足的性能指标如下:a.增益:大于11dB;b.3dB波束宽度:E面为20°,H面为110°;c.副瓣电平:小于-13dB;d.驻波比:小于2。
为简化设计起见,本设计采用波导宽壁斜缝谐振阵的方式,切割的缝隙数为4个,达到了指标要求的效果。
1 理论分析
1.1 串联缝隙阵的模型
由波导内的场分布情况可知:当波导宽边中心开斜缝时,窄缝在纵向不切割电流线;在缝的横向由于对电场的扰动,使得总电场在缝的两侧发生跳变,即电压跳变,故相当于在传输线上串联了一个阻抗。对中心馈电的谐振线阵模型来说,假设波导壁上开有Ⅳ爪斜缝,缝与缝中心间距λg/2,为取得同相激励,相邻缝交叉倾斜放置,波导末端短路板距终端缝隙λg/2,以使缝隙中心处于电压或电流最大值位置,线阵模型如图1所示。

其等效电路如图2所示。
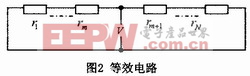
图中所示均为归一化的等效电阻。
1.2 缝隙特性参数的分析
在天线工作频率的选取上,本雷达系统的工作频率为10.5GHz,故该天线的工作频率为10.5GHz,,对于阵列中各单元以等间距位于直线上的线阵,其阵列因子可表示为:
其中An为激励的幅度,θ为观察方向与直线的夹角,d为阵元间距。由于谐振阵各单元是同相的,即φn=O,则上式可简化为:

当u=2mπ,m=O,±1,…时,S取最大值,且m=0时为主瓣。为了实现低副瓣并使主瓣展宽,采用中心馈电从阵中到边缘幅度递减,按泰勒线源分布加权各缝隙,两边呈对称分布,其方向图零点位置由下式决定:
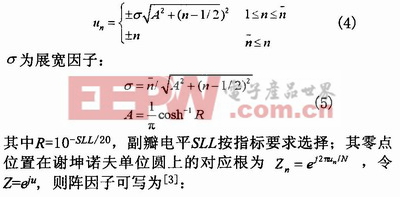

将后一项按多项式展开,Z的各次幂系数即为相对应的激励幅度。
由图2,当波导采用中心馈电并处于谐振的时候(其阻抗虚部为零),对泰勒分布而言,则有:

将之前得到的每个缝隙的激励幅度代入即可求得相应的归一化电阻值,在本设计中N取4。
A.F.Stevenson利用洛伦兹互易定理及波导中功率的平衡方程,得到了串联缝隙的归一化等效电阻表示式为:

其中β表示缝隙中心线与波导宽边中心线之间的夹角,α为宽壁的长度,b为窄壁的长度。将之前求得的rn代入并求解方程可得到对应的缝隙偏角。
1.3 影响天线性能的因素
应用以上所计算出来的结果来进行天线的设计,还必须考虑缝隙间的互耦问题;若不考虑互耦,将使天线口径面的幅度分布和相位分布变坏,同时也将恶化天线的输入端匹配。近年来随着计算机辅助技术的飞速发展,在设计比较小的缝隙阵列时,通过仿真得到近场数据的近场诊断法越来越受到重视。在缝隙数为4的情况下,根据上面得出的参数,结合CST软件中参数扫描的功能,能够快速地找到准确的电参数,大大提高了设计的效率。
串联缝隙与纵向缝隙相比,由于其角度偏转的原因,其交叉极化辐射要比纵向缝隙高,这会带来副瓣电平的升高和增益的降低,仿真结果也证实了这一点,而这是我们在设计中所不希望看到的,需要采取措施抑制交叉极化辐射。在本设计中,采用在每个缝隙上方加一个小波导口的办法,小波导的传播方向垂直于缝隙所在的平面。在不增加其传播方向长度的情况下,通过控制小波导的宽边尺寸,使其截止波长小于缝隙在交叉极化方向上传播模的截止波长,来抑制交叉极化电平。为进一步降低交叉极化电平,同时也对主瓣波形进行调整,参照仿真结果,可在小波导口中间插入金属片来进一步减小其宽边尺寸,仿真结果表明,该方法能有效地降低交叉极化所带来的影响。
2 建模与仿真
本文在设计波导缝隙天线的过程中,设计中的数值仿真都是在CST时域求解器的环境中完成的。
2.1 天线模型的建立
辐射波导选用的尺寸是22.86×10.16mm,缝一侧的波导壁厚1mm,缝宽为2mm,波导两端为理想短路面;截止波导16×8mm。建立模型,其框架图如图3所示:
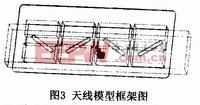
其中黑色标记处为同轴线中心馈电点;辐射口上方的方形材料为天线罩;从左到右缝隙的编号依次为1~4。
2.2 仿真结果分析
仿真中将缝长l和倾角β设置成变量,l的初始值取λ/2,利用CST的参数扫描功能,对缝隙长度和倾角进行扫描。通过设
缝隙 天线 方案设计 波导 系统 车载 雷达 基于 相关文章:
- 基于车载雷达系统的波导缝隙天线设计(11-27)
- 第四代移动通信系统中的多天线技术(08-05)
- 教您如何用天线扩展无线网络覆盖范围(04-20)
- TD-LTE/GSM共站部署技术(06-17)
- 基站天线与移动通信中的干扰抑制(12-17)
- FA/D双频独立电调天线 加速TD-LTE网络部署浪潮(08-12)