RTK GPS定位技术在驾驶员道路考试中的应用
0 引 言
随着社会进步,机动车保有量越来越多,汽车成了普通人的代步工具,参加驾驶员培训、准备拿驾照的人越来越多,为规范驾驶员培训,有必要研制开发一种能对驾驶员的驾驶技能和安全意识进行科学、规范测试的自动化考评系统。
现在,驾驶员拿驾照前要通过实际道路驾驶技能考试(科目三考试),即驾驶员在考试时要驾驶考车在3~5km的实际道路上完成上车准备、起步、直线行驶、变更车道、通过路口、通过人行横道线、学校区域、通过公共汽车站、会车、超车、靠边停车、掉头、夜间行驶和综合评判共计14个考试项目,其中需要检测考车相对于道路边缘线、道路中间线、路口停车线、车道分割线的距离,以及检测直线行驶、掉头等考试项目是否合格。
本文研制的一种驾驶员实际道路驾驶技能自动化考试系统采用RTK GPS定位技术,能对考车在实际道路上的位置进行动态定位和测距,其精度可以达到厘米级,很好地满足了系统对考车定位和测距的高精度要求。
1 载波相位实时动态差分技术(RTK)定位原理
采用RTK GPS定位技术对考试车辆在道路上的位置进行动态定位,其系统组成通常包括三部分:基准站,移动站(考车)和通信单元。基准站通常设置在考试道路附近的建筑物上或路边立杆上,移动站安装在考试车辆上,通信单元用于实现基准站和移动站之间的数据通信,如图1所示。基准站实时接收GPS卫星信号,其伪距的载波相位观测量见公式(1),并将观测量以广播的形式发送出去;移动站(考车)实时接收GPS卫星信号,其伪距的载波相位观测量见公式(2),同时接收基准站发送的载波相位数据,进行组差解算,其伪距观测方程见公式(3),通过计算得到厘米级的考车定位坐标。

式中:Nir,o,Nip,o是整周模糊数;Ni r,Nip是从初始历元开始至观测历元间的相位整周累积数;Φi r,Φip是测量相位的小数部分;λ是载波波长,L1载波波长是19cm,L2载波波长是24cm.
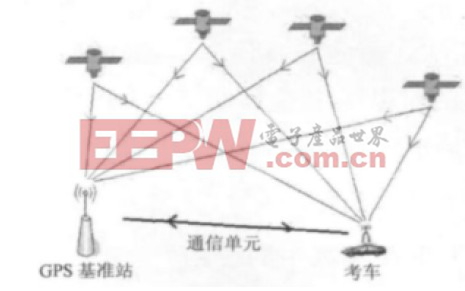
图1 原理组成

式中:Δ-ρ是同一观测历元的各项残差之和。
在使用RTK GPS定位技术对考车位置进行精确测量时,整周模糊数的正确求解是获得高精度考车定位位置的必要条件。求解整周模糊数采用整数最小二乘理论,即首先利用最小二乘法求出浮点解,再通过快速搜索算法在整数约束条件下求出整周模糊数,最后得到固定解。在本道路考试系统研制时,为了实现对考车行驶过程中的实时定位,采用组合波宽巷处理技术对整周模糊数求解,工作时采用双频GPS接收机,利用常规码载波相位差分测量,得到一个整周模糊度的近似估值,然后对伪距噪声及多路径效应进行平滑,减少整周数的搜索个数,最后根据双频信号,通过两种波长(巷宽)的线性组合,可以得到一个宽巷的巷宽。
GPS的二个载波信号:f1=1 575.42 MHz,波长λ1=19cm;f2=1 227.60MHz,波长λ2=24cm,通过公式(4)的计算得到一个宽巷波长λ 宽为86cm 的巷宽。

宽巷的波长比单频的波长大4倍,利用宽巷极易在估值范围内求出巷宽的整周模糊数,再利用f1和宽巷参数间的线性关系求出f1和整周模糊数。该方法求解速度快,一般只需要几秒到十几秒就可以快速求解出整周模糊数。在本道路考试系统中,考车行驶时受树木、建筑物、桥梁和山峰等障碍物影响会出现周跳误差,导致定位精度变差,考车驶出遮挡物的影响区域后,在不到10s的时间内就可以消除周跳误差恢复到精确定位。
RTK GPS定位系统工作时,基准站需要把观测得到的载波相位信息实时传送到考车上的移动站,为保证考车定位信息的高精度,要求数据传送的误码率小于10-7,差分信息的更新时间不高于10s,这对基准站和考车之间的无线通信单元提出了较高的要求。
本道路自动化考试系统研制时,利用满足IEEE 802.11a/b/g协议要求的无线基站端、无线客户端设备(AP)组建一个能在控制中心(基准站)和考车(移动站)之间实现音频、视频、数据通信的无线局域网来传送基准站观测的载波信息到移动站,很好地满足了RTK GPS定位系统中对数据链通信的要求;该通信单元也可以利用中国联通、中国电信提供的3G业务平台组建一个虚拟专网(VPN)来实现。
2 在驾驶人道路考试中的应用
如此,考车P 到交通标线间的距离可以通过公式(6)计算得出,进而判断考车在道路上是否按交规正确行驶和停车,图4给出了考车在道路上靠边停车项目考试时的检测软件流程图。

式中:δ1 =A1xi+B1yi+C1zi+D1,δ2 =A2xi+B2yi+C2zi+D2,n1 = {A1,B1,C1},n2 = {A2,B2,C2}.
在检测考车与路边缘线之间的距离时,实际上检测考车右前端和右后端离路边缘线的距离,取其大者
道路 考试 应用 驾驶员 技术 GPS 定位 RTK 相关文章:
- 我国工业互联网发展历程和道路探索(05-25)
- 利用SQL Server存储过程提高在线考试系统的性能(02-24)
- 浅析ICS直放站的应用(08-07)
- 基站应用中功放的分立控制和集成控制(04-25)
- 电子标签:RFID技术应用与七大特点(05-12)
- 射频/微波器件面向太空应用可靠性是关键(12-17)