基于模拟技术的图像增强方法
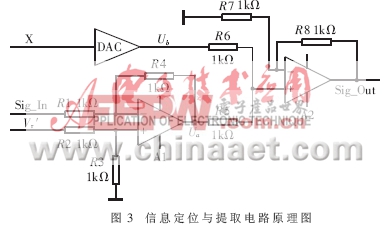
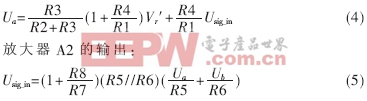
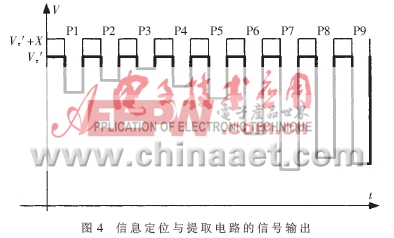
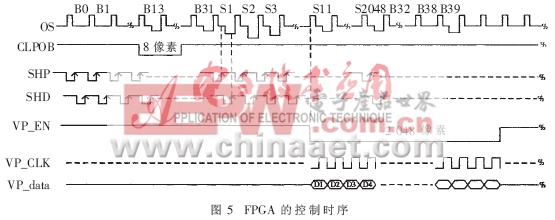
,也可以由灰度的统计分布情况进行灰度分析。本文中给出由主导灰度的统计分布实现灰度分析的算法。算法如下: 确定灰度直方图中主导灰度的起始位置与范围。 设灰度直方图中灰度值为ri,其分布函数为F(ri),灰度量化为L级,主导灰度的阈值为T。 求出满足公式(1)的所有的rij、rj的值: 将坐标右移的数值通过I2C接口传递到DAC芯片MAX5280进行锁存,将放大倍数通过SPI接口传递到视频AD2的可编程增益控制器中决定细节图像的放大倍数,从而完成采集条件的设定。 然后进行CCD的图像采集增强,图2中以细实线表示此过程:两片视频AD同时采集所观察图像的模拟信息,分别得到原图图像和细节图像,在DSP中将原图图像和细节图像进行灰度映射得到模拟增强图像,根据算法和观察需要可选择某幅图像进行处理。在本实现中,是将三幅图像通过网络传递到PC机中进行显示比较。 模拟细节图像的采集过程分五步进行: (1)相关双采样[3]处理,滤除CCD信号中的低频相关噪声,获得像素输出电压差。 (2)信息定位。其具体实现电路可以有多种方案,本文给出一种实现,实现的原理图如图3所示。 放大器A1实现了输入Sig_In的反向与vr′的叠加,放大器A2实现DAC输出的直流电压X的抬升,并且放大器A2的饱和溢出位置为vr′。 放大器A1、A2需满足电阻平衡要求,如公式(3)。 选择所有电阻均为1kΩ,可以满足电阻平衡要求。 放大器A1的输出: 将(4)式代入(5)式,并将电阻阻值1kΩ代入得输出表达如下式: 经过以上变化后,模拟CCD信号如图4所示。其中粗线表示变化后的信号,细线表示被抬升后的信号。由于放大器A2的饱和溢出位置为vr′,因此细线所示信号经过放大器A2后并不输出,达到了模拟信息定位的目的。 (3)进入视频AD2芯片,再次通过相关双采样处理,获得模拟定位后的像素输出电压差。 (4)通过视频AD2的可编程增益放大器,将信号幅值放大αβ倍(α来自CCD采集条件设定,β是原图的放大倍数)。将定位后的模拟信息进行提取。 (5)量化后形成细节图像。 在图像采集中,同步时序驱动贯穿整个过程,图2中以虚线表示。同步控制由FPGA实现,首先产生对线阵CCD的正确驱动,在数字图像的采集过程中,将线阵传感器输出拼接成一幅指定高度的数字图像;其次正确驱动相关双采样,根据CCD的输出正确控制相关双采样中开关电容的动作;最后产生正确的数据标记时刻,包括正确标记AD的采样时刻与DSP的数据接收时刻。 FPGA的时序如图5所示。图中OS信号是TCD1209D输出的模拟信号。CLPOB信号用于控制视频AD完成暗电平自动校准,因为TCD1209D的光学暗像素为B13~B28,而AD9846A要求自动校准时间为2~20个像素时间,因此,设计中CLPOB的有效时刻从B13开始,持续了8个像素时间。SHP、SHD是视频AD用来采样暗电平和有效电平的信号,上升沿有效,其上升沿时刻需要在实现中给予关注以完成相关双采样的正确采样。VP_EN是DM642视频接口接收数据有效控制信号。由于AD9846A在10个像素时间后输出采样结果,因此VP_EN的有效时刻是在S11像素处。VP_CLK是视频接口的时钟信号,其上升沿有效。VP_data是视频接口的数据,其数据D1是像素S1的数字采样信息。TCD1209D的时序控制[4]可参照数据手册,在图5中并未绘出。 3 实验结果及分析 图6给出了6幅图像,除原图外分别采用数字增强和模拟增强生成的图像。 原图(a)为了清晰地拍摄菊花花瓣,采用了较强光源,同时也造成了下方的浅纹曝光过度。另外三张图片对原图使用数字方法进行增强:(b)图采用数字直方图增强,(c)图采用数字频域锐化,(d)图采用数字小波增强,它们从不同方面增强了原图。但可以看出,它们都没有提供原图中由于曝光过度而丢失的浅纹信息。采用模拟增强技术达到了不同的效果――在模拟细节图像(e)中采用坐标右移与模拟放大技术添加了曝光过度丢失的浅纹信息,同时可以看出浅纹的对比度比原图有明显提高,接下来将细节图像(e)与原图(a)进行变换,灰度映射成模拟增强图像(f),从中既可以清楚地看到菊花花瓣,也可以清楚地看到浅纹信息。 本文针对数字图像增强技术中存在的不足,提出一种基于模拟技术的图像增强方法。通过分析与实验表明,模拟图像增强具有数字算法图像增强所不具备的优势,而这些功能都是用数字的方法实现不了的。本文所述的模拟图像增强方法可以添加超出量化量程的丢失信息,也可以补充量化后低对比度中的有限信息,所补充信息的分辨程度可以达到采用高分辨模数变换芯片无法实现的精度,最终达到图像增强的目的,为后续的图像识别或视觉观察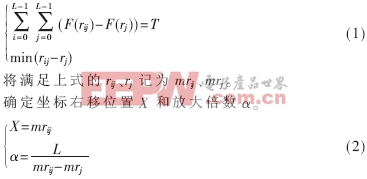



- 采用数字电源还是模拟电源?(01-17)
- 从模拟技术到IP监控过渡的因素分析(09-18)
- 功率因数校正(PFC)的数字控制方法(12-22)
- 不要让你的信号变得混杂有关转换器的知识(第一部分)(04-10)
- 解析四线传感器的误差补偿方式(07-10)
- 从模拟技术到IP监控过渡的要点分析(03-13)