一种基于机器视觉的结构光三维扫描系统
时间:07-15
来源:互联网
点击:
像的对比度,突出图像中的高频部分,如图6、图7所示。其次采用自动阈值技术对图像进行二值化处理,如图8所示。为了得到更清晰的图像。采用相关的滤波器将小颗粒噪声去除,处理结果如图9所示。 3. 3 实验数据 3.4 结果分析

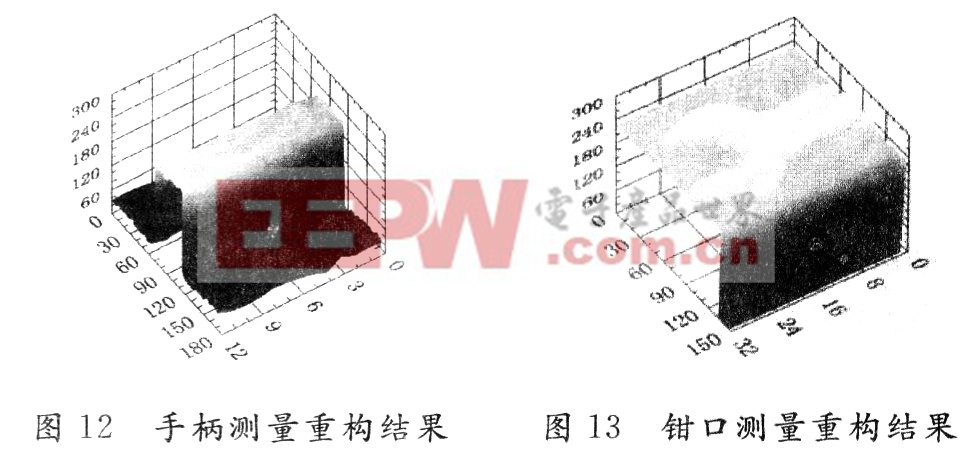
图10、图11给出了扳手手柄和钳口处的高度信息提取结果。通过对多处截面进行高度信息提取,可以重构处扳手的三维图像,如图12、图13所示。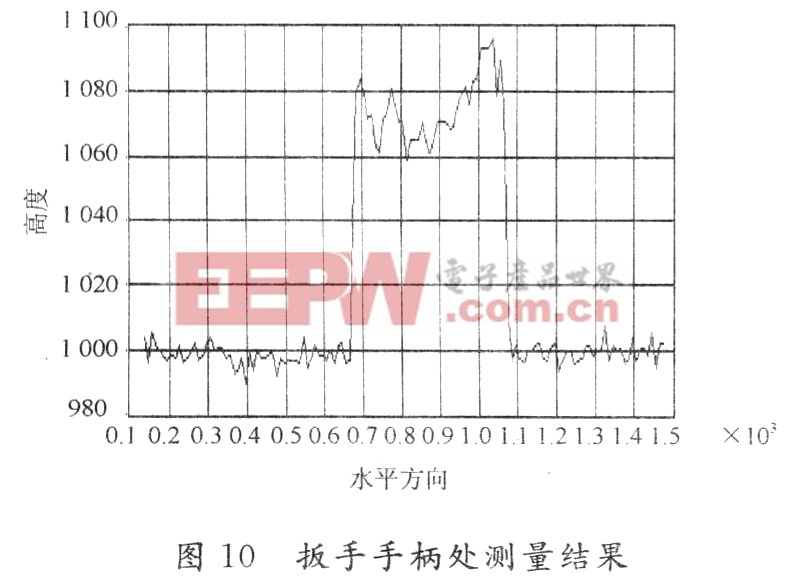

经过分析上述的测量数据,总体误差为4.47%。从实验测量结果来看,实现系统还有待进一步提高。影响其精度的主要原因如下:
(1)由于本系统采用的激光光斑比较粗,从一定程度上影响了精度。
(2)对激光光斑的提取算法性能不足,可进一步改进。
- 新一代工业级智能相机选购指南(10-04)
- 自动化行业新焦点,机器视觉引潮流(12-21)
- 机器视觉技术在半导体行业蓬勃发展(12-21)
- 为什么在工业自动化中使用机器视觉(10-09)
- 行业测量技术最佳选择:高精度机器视觉尺寸测(09-18)
- 利用NI机器视觉方案改进您的PLC系统(08-08)