基于虚拟仪器的服装裁剪机数控系统
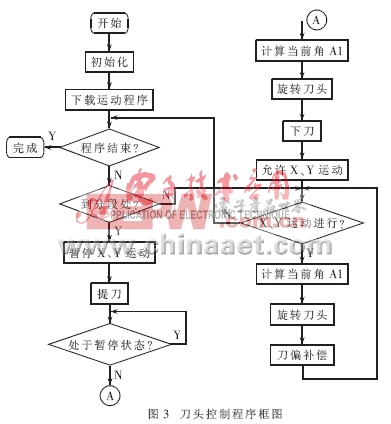
(1)刀头控制模块:对刀头的角度控制包括控制刀头前进方向与X-Y平面内的运动轨迹切线方向一致,并根据刀面受力状况对刀头偏转角度进行补偿。刀头控制的程序框图如图3所示。具体实现则主要靠调用动态链接库pmac.dll(PCOMM32中提供)的相应函数。已定义的M变量可以在程序里像使用任何其他变量那样使用。例如程序中判断“程序结束?”读的是M150的状态,判断“到分段处?”读的是M151的状态,它们都可以采用调用动态链接库中的函数PmacGetResponseA轻松地实现。而对步进电机的运动控制则是通过在LabVIEW中调用C源代码,即利用CIN代码接口实现。 为了保证刀头围绕Z轴的角度调整能及时跟上运动轨迹的变化,即达到实时性要求,应对刀头控制做优化改进,现以图4的衣片图样为例说明: 当运动到A、B、C、D、E 5个不连续点时,要先使PMAC的运动程序暂停,待步进电机带动刀头偏转到需要的角度时,再控制运动程序继续。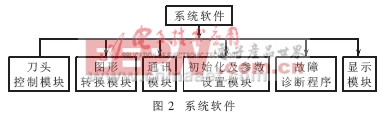
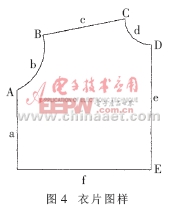
连续运动段基本上由平滑曲线组成。对连续运动段,可根据其曲率变化,设置不同的运动速度。如a、e、f段为直线,可设运动速度为100mm/s;b段设为50mm/s;d段曲率最大,运动速度要再慢一点,可设为5mm/s。这样,在每个扫描周期步进电机只需要调整很小的角度就可以满足要求。
经过这样的运动规划后,既保证了较快的裁剪速度,又确保了刀头转角及时到位,满足了系统的实时性要求。
(2)图形转换模块:将衣片的AutoCAD图形(.DXF格式)转化为PMAC运动控制器能够识别的运动程序(.PMC格式)。这样即使不熟悉PMAC的工艺人员也可以很方便地通过将CAD图样进行转换来生成衣片图样文件,而不必直接编辑复杂的PMAC源程序。
(3)通信模块:主机通过总线与下位机进行通信,Delta Tau公司提供了许多软件库,这使得主机通信程序的开发变得更加容易。动态链接库(DLL)是一个位于应用程序外部的过程库,它是可共享和重入的,并可以从应用程序中调用,在运行时被动态链接,当要执行DLL中的函数时,根据链接产生的重定位信息,Windows转去执行DLL中相应的函数代码,从而节省了宝贵的内存资源。PCOMM动态链接库提供的函数几乎可处理所有需要的底层操作。在Windows环境中利用动态链接库pmac.dll中提供的各种函数,建立上位机和下位机的通信。
(4)初始化及参数设置模块:上下位机建立通信后,就要进行系统初始化,包括全局变量赋初值,X、Y轴回原点,旋转轴回零位(通过接近开关检测是否到位)等。参数设置包括X、Y轴的运动速度、加速度、回零速度等变量的设置。
(5)故障诊断程序:诊断程序可以在系统工作过程中,随时发现系统故障,并能指示故障类型。当发生故障时,该模块可提供一种辅助诊断手段,增加系统的易维护性。
(6)显示模块:用于动态显示衣片图样的加工轨迹,可分为自动、手动二种方式。设置为自动时,图形显示范围自动调整;设置为手动时,显示范围固定。这可以运用LabVIEW提供的X-Y Gragh函数方便地实现。
3 总 结
在PC机上嵌入PMAC卡开发数控裁剪机时,可充分利用PMAC卡在处理运动控制方面的强大功能。运用基于Windows系统的LabVIEW软件,调用动态链接库函数和CIN接口可方便地实现上、下位机之间的通信,大大加快了开发速度。实际运行结果表明,控制系统运行可靠、准确,满足了实时性要求。
- 采用LabVIEW的近红外测量方案 (01-18)
- I/O接口设备驱动设计方案(12-21)
- 基于虚拟仪器的电网综合参数测控系统(06-21)
- 基于虚拟仪器技术设计馆藏室温湿度监控系统(10-11)
- 利用虚拟仪器设计的网络化温室测控系统(12-08)
- 基于虚拟仪器的CANopen协议监控面板设计(07-02)