变频器PID控制应用
号通道选择见表 3 。
6 . P 、 I 、 D 参数的预置与调整
(1) 比例增益 P
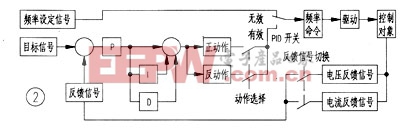
变频器的 PID 功能是利用目标信号和反馈信号的差值来调节输出频率的,一方面,我们希望目标信号和反馈信号无限接近,即差值很小,从而满足调节的精度:另一方面,我们又希望调节信号具有一定的幅度,以保证调节的灵敏度。解决这一矛盾的方法就是事先将差值信号进行放大。比例增益 P 就是用来设置差值信号的放大系数的。任何一种变频器的参数 P 都给出一个可设置的数值范围,一般在初次调试时, P 可按中间偏大值预置.或者暂时默认出厂值,待设备运转时再按实际情况细调。
(2) 积分时间
如上所述.比例增益 P 越大,调节灵敏度越高,但由于传动系统和控制电路都有惯性,调节结果达到最佳值时不能立即停止,导致“超调”,然后反过来调整,再次超调,形成振荡。为此引入积分环节 I ,其效果是,使经过比例增益 P 放大后的差值信号在积分时间内逐渐增大 ( 或减小 ) ,从而减缓其变化速度,防止振荡。但积分时间 I 太长,又会当反馈信号急剧变化时,被控物理量难以迅速恢复。因此, I 的取值与拖动系统的时间常数有关:拖动系统的时间常数较小时,积分时间应短些;拖动系统的时间常数较大时,积分时间应长些。
(3) 微分时间 D
微分时间 D 是根据差值信号变化的速率,提前给出一个相应的调节动作,从而缩短了调节时间,克服因积分时间过长而使恢复滞后的缺陷。 D 的取值也与拖动系统的时间常数有关:拖动系统的时间常数较小时,微分时间应短些;反之,拖动系统的时间常数较大时, 微分时间应长些。
(4)P 、 I 、 D 参数的调整原则
P 、 I 、 D 参数的预置是相辅相成的,运行现场应根据实际情况进行如下细调:被控物理量在目标值附近振荡,首先加大积分时间 I ,如仍有振荡,可适当减小比例增益 P 。被控物理量在发生变化后难以恢复,首先加大比例增益 P ,如果恢复仍较缓慢,可适当减小积分时间 I ,还可加大微分时间 D 。
二、 PlD 应用实例
1 .项目描述
选用创世 C : SBG 型变频器,利用其 PID 功能对某办公楼中央空调的冷冻水循环系统进行自动控制。
对于冷冻水循环系统的控制方式,有以下几种方案可供选择:
一是恒温差控制,就是以回水温度和出水温度之差作为控制依据,利用温差控制器的 PID 功能,输出变频器的频率给定信号,这种方案无须启用变频器的 PID 功能。
二是恒压差控制,即根据冷冻水泵的出水压力和进水压力之差进行控制。
三是恒温度控制。如果冷冻主机的出水温度比较稳定,只要测量系统的回水温度,利用变频器的 PID 功能.即可实现与恒温差控制相同的控制效果。本实例选用的是这种方案,应用于夏天制冷。
2 .应用电路
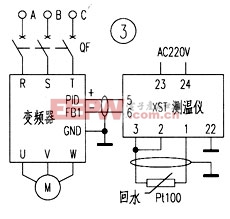
应用电路见图 3 。图中的变频器为创世 CSB 型,规袼为 30kW ,其参数设置见表 4 。设置时首先通过 P126( 见表 4) 使所有参数恢复出厂值,这样做的好处是,尽管该变频器的参数有一百多个,但有相当一部分在本实例中并无实际意义;而有用的参数又有一部分可以 默认使用出厂值。这使得参数设置变得相对简单。参数 P98 的设置 ( 见表 4) 使. PID 功能有效,反馈逻辑为正动作。创世变频器有专用的反馈信号输入通道,即 PID / FBl 和 GND 端子 ( 见图 3) ,由参数 P99 设定反馈信号为电压输入 0 ~ 5V 。目标信号由参数. P03 设定,由于参数 P103 和 P104 已设定了温度传感器的量程上限和下限,所以这里可设定回水期望的温度绝对值,具体数值,可比出水温度高 5 -10 ℃ ,根据空调房间的降温要求确定。
冷冻水循环水泵在运行中不允许停机.所以对参数 P16 和 P105 进行设置。变频器的其他有效应用参数在表 4 中没有列出,默认使用出厂值。
测温仪为厦门恩莱公司的 XST 型自动化仪表,将仪表的温度测量范围设置为 0 ~ 100 ℃ ,相应的输出信号为 0-5V ,即温度为 100 ℃ 时输出 5V 电压信号, 0 ℃ 时输出 0V 电压信号,这与参数 P99 设定的反馈信号选择相吻合。这个测温输出信号就是对变频器的反馈信号。
3 .应用效果变频器与空调系统安装完成后,投入正式运行,获得节约 30 %电能与房间温度稳定的良好效果。


模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)