基于ZigBee网络RSSI的室内无线定位技术
:
(1)无需提供测距差测量值误差的先验信息。
(2)可以应用于两个以上数目距离差测量的定位估计。
(3)对距离差统计没有特殊要求。
(4)在适当的距离差噪声水平上提供较准确的定位估计。
使用泰勒级数进行定位计算,首先面临的一个问题即泰勒级数展开需要一个与实际位置差距不大的初始值,初始值的选择越接近真实值,越可以保证算法的收敛性以及实时性。本文采用极大似然估计法来获取初始值,求得初始值公式为:

式中:

根据取得的值作为Taylor级数展开的循环初值,然后用Taylor级数展开,进行矩阵计算,并反复迭代求精,直到误差满足预先设定的门限,得出最终的位置坐标。


式中:

在每一次递归中,令

4 实验验证
实验是在实验室走廊(4 m×30 m)进行的,实验环境如图4所示。选用的是ZigBee硬件平台作为通信平台,该平台CC2431自带定位引擎,可以实现位置估计,并通过实验比较两种算法的差异。
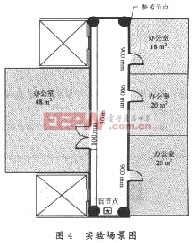
CC2431使用的三边测量法进行位置计算,采用均值滤波对RSSI进行滤波处理。ZigBee开发平台如图5所示。

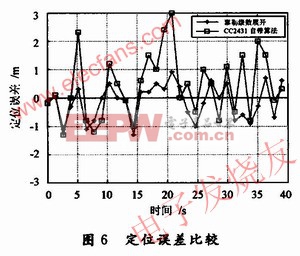
在实验环境中布置4个节点作为参考节点,位置分别定义为(O,0),(0,4),(30,O),(30,4)。确定A和n的值,实验境与图2的实验一样。可以得知,A=41,n=2.3。在环境中任取31个点,分别测得该点的实际位置(x,y);使用CC2431得到的位置(x’,y’),使用本文提
出的算法得到位置(x",y")。比较两个位置的误差大小d'与d",如图6所示。
其中:
由图6可以看出,经过线性回归分析和高斯滤波,然后用泰勒级数展开,最终求得位置误差大约在1 m左右,而CC2431的定位误差在2~3 m左右。本文提出的定位算法较好地改善了定位效果,使定位误差主要集中在1 m左右,基本能够满足室内定位对误差的要求,提高了定位精度。
5 结语
对基于RSSI的室内定位算法以及RSSI测距进行了全面分析。通过线性回归分析对参数进行优化,高斯模型对RSSI进行滤波,提高了测距的精度。最后采用泰勒级数展开法进行位置计算,比较了CC2431的定位算法,减小了定位误差,达到了提高定位精度的目的,证实了定位算法的优越性。
模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)