无传感器控制高效永磁电机低成本的方法
流传感器硬件。这种算法使得压缩机可以使用高效率的IPM电机,并且使采用表面安装磁体电机或IPM电机的风扇可以取消霍尔传感器。
无传感器控制算法
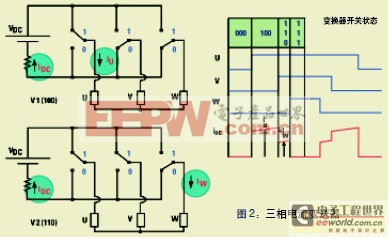
图1当中的控制算法包含了在无传感器的情况下用正弦电流驱动一台IPM电机或者表面安装磁体电机所需要的所有控制功能。这种算法的一个关键要素是一种使用了矢量旋转模块(e-j)的场定向控制结构,这种场定向控制结构同时还可以将交流的电机绕组电流转换成2路直流电流分量,一路用来产生扭矩,另一路用来控制磁通量。输入给旋转模块的电流最初采用Clarke变换模块从3相变换为等值的2相电流。转子磁通量角使电流分割成D分量,D分量与磁通量结合到一起。Q分量用来产生扭矩。2个电流控制PI补偿器的整定与电机绕组的RL时间常数相互匹配并且无需随着交流绕组电流频率的改变而改变。前向矢量旋转模块(ej)将PI补偿器的直流电压输出转换成与转子频率相符的交流电压。空间矢量PWM单元根据计算出来的交流电压要求计算功率转换二极管的切换时间。空间矢量调制自动加入3阶谐波来产生正弦电压调制,最大限度的利用直流总线上的电压。其中还包括了一种2相调制功能,可以尽量降低功率转换器的切换损失。
最大限度的提高每安培电流的电机扭矩输出,使电机的效率最高。对于表面安装磁体电机来说,就是控制器将电流(ID)的磁通量分量保持在0水平来使电机效率最高。但是由于IPM电机特别的转子结构,一台IPM电机会产生一个被称为磁阻扭矩的附加扭矩分量。在驱动一台IPM电机的时候,IPM控制模块会将ID电流从0开始增加,这是IQ目标的一个功能,目的是让电机运行在效率最高的工作点。在任何的情况下,速度回路补偿器都会计算将速度维持在目标值所需要的扭矩电流。在有些应用当中,例如洗衣机,需要比较宽的速度范围。在这种情况下场电流减弱控制功能会加入负磁通量电流(ID)来降低电机的有效反电动势,并且在反电动势达到直流总线电压限制之前允许电机运行在比较高的转速下。
目前有许多工业驱动系统使用这里介绍的算法结构,但是这种算法结构要求电机具备解码器或是编码器反馈。这种算法结构具有一个独特的特点,就是它能够通过电机绕组电流来推算出转子的位置和速度而无需物理传感器。这种无传感器算法通过下面等式表示的电机回路模型推导出电机转子的磁通量状况。控制器驱动定子的电压,同时电流重建回路检测电机的总电流。对等式的各项进行一个简单的重新排列和数学合并就能够产生sine和cosine项。一个相位锁定的回路不断跟踪这个算法,推导出角度和速度,就类似于用在IC数字变换解码器上的类型。
这种算法的第二个特点是相电流变送单元根据换流器直流链接的电流量来推算出电机的相电流。参见图2的说明,对于任何一个运行中的换流器单元来说,总有一个绕组被连接到一个总线导轨,同时有另外2个绕组被连接到其它总线导轨。这就是说每一个PWM循环都会有2个电机绕组的电流值可用。相电流变送单元包括一个根据SVPWM输入运行的采样计时发生器、一个采样模/数转换器和计算三相电流的数学运算单元。这种方式的明显优点是可以不需要隔离的电流传感器以及能够让无传感器算法在家用电器上的应用具有更高的效/费比。
无传感器控制算法是一套应用于家用电器电机控制的一体化设计平台的一个组成部分。一个混合的信号控制IC能够以硬件方式执行这种算法,不需要进行任何复杂冗长而且很容易出错的软件开发。这个IC集成了电流测量所需的 模/数转换器和缓冲放大器。你可以在图1中看到包括故障检测功能和开车顺序的附加硬件功能。最后,这个控制IC还集成了一个自带内存的8位微处理器内核用来执行家用电器工程师规定的其它应用功能。
模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)