开放式控制平台及其在无人潜航器制导系统中的
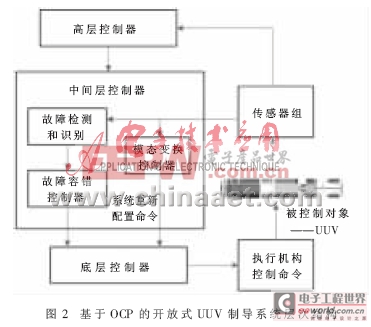
以UUV姿态控制为例,基于OCP的控制系统的典型结构是分层控制结构。如图2所示,可以非常明显地看出,根据UUV主控节点的功能,将控制划分为三个层次:
(1) 系统底层控制主要完成控制系统最基本的功能,如系统的稳定性、调节时间控制等,这层是所有系统最基本的,该层也负责与节点的操作系统打交道。由于CORBA的ORB是一种软总线技术,负责提供对象间信息流通所需的通路,不同硬件平台在传递参数时均使用自己的格式,一旦进入ORB,CORBA均将其转换为一种通用的格式。因此在采用了ORB技术后,该节点的许多子程序可以被网络上其他节点调用,即使调用节点使用的软硬件平台不一致也没有关系。
(2) 中间层的控制作用主要是完成系统的离散事件处理,如模态的变换、故障的处理等。模态是指航行器从一种航行状态到另一种航行状态的变换。故障处理包括系统故障的识别、故障检测、故障隔离以及为了处理系统故障而采用的系统控制的重新配置。另外,该层还要负责处理来自传感器的信号,包括信号的滤波、信号的识别等。尤其是当出现传感器故障时,该层还负责信息融合、传感器故障的识别、隔离和信号的重构。
(3)高层控制器是UUV制导系统主控节点的中枢,功能包括系统的程序弹道设置以及为完成系统任务而需要的航程规划等。
主控制器节点控制算法的分层是为了适应基于嵌入式系统的OCP结构,它能完全满足图1所示的软件结构。图2的中间层和高层控制可以按所选用的ORB规范设计成通用组件模块,可供本节点使用,也可供其他节点调用。
2.3 中间件技术和异构网络及其在UUV制导系统中的作用
基于CORBA的OCP技术在UUV制导系统中的主要作用可以归结为两点:软总线技术和中间件技术。
基于OCP的嵌入式UUV制导系统软件框架的核心,是在现场总线和实时多任务操作系统基础上的分布式控制平台上的应用程序采用了实时CORBA技术,而ORB又是CORBA的核心。如前所述,ORB的作用实质上是一条软总线,所有的组件都挂接在该总线上。只要遵照规定的总线通信协议,ORB允许在不同平台下的最底层的组件能够相互通信。在TTCAN实时总线[6]的支持下,实时CORBA的中间件技术支持分布式处理和内部组件之间的实时通信,图3表示了基于ORB软总线的UUV姿态控制的结构图(其中姿态控制器组件的结构如图2所示)。

在图3中的软总线上有5个节点组件,系统的陀螺仪和惯性组件所敏感的信号都可以作为UUV姿态的控制信号,但陀螺仪和惯性组件所敏感的信号具有不同的精度和时间标尺。利用中间件的软总线技术系统的可重新配置功能,姿态控制器可以很容易地根据两组敏感元件的输出和系统的需求进行敏感元件的切换,而不必根据全系统的性能来决定这两个敏感元件的切换。因此,系统中的事件通道可以根据局部的需要来极小化组件的切换。
在计算机软硬件系统中,层次是一个非常重要的概念和技术,几乎所有的操作系统和应用软件都是按层次结构设计的。由于OCP的作用是隔离操作系统和应用组件,因此,采用这种中间件技术可以更有效地做系统开发,可以使工程师在开发应用系统时不必要有过多的操作系统知识,而可集中精力在自己的应用程序上。其次,由于采用中间件技术,OCP具有与系统无关性,这样在进行系统原理设计时,底层的平台就能够使用比较熟悉的软件系统,如Windows等,而不必要一开始就使用类似的VxWorks,以便能够更有效和更快地做出方案设计。
3 基于OCP技术的UUV制导系统的特点
OCP是美国DARPA的SEC规范中的一个重要部分。DARPA提出SEC的主要目的就是为了解决复杂的UAV控制问题,目前国外有关SEC和OCP的研究报告也主要集中在无人自主航行器上,包括空中航行器、地面航行器和无人旋翼飞机。出于保密的原因,尚未看到在UUV武器中的研究报告。但由以上研究可以看出,基于SEC和OCP技术的UUV制导系统有许多特点:
(1) SEC和OCP,包括CORBA都是一种规范,国外包括波音公司在内的许多大公司都在围绕这些规范开发自己的应用系统,开发自己的适合UUV的软硬件规范和实时总线协议规范,对于指导UUV规范的发展非常有利。
(2) 采用中间件技术可以有效地解决目前UUV内部的多CPU型号和多操作系统带来的问题,由此不但可以降低系统的开发成本和缩短研制时间,还可以提高系统的可靠性、可维护性和可扩展性。
(3) OCP使用中间件技术与操作系统无关性,可以最大限度地解决目前嵌入式系统开发的难度。在最底层的硬件和操作系统的基础上,UUV工程师可以按照规范来设计应用程序。这样可以制定项目开发规范和规章,更好地解决目前UUV武器系统开发中各自为战的局面,对提高系统的质量有很大的好处。
(4) SEC和OCP在UUV中的应用必须建立在实时多任务嵌入式和实时总线的基础上,才能够充分发挥OCP的功能。
(5) 目前国内的SEC和OCP技术,与实际应用还存在一些距离,尤其是工程化的问题、组件的数字化问题、相应的新的控制技术和制导技术的变化等问题。在国内,这些新技术在UUV研制中的应用虽然还是空白,但它具有广阔的前景。
本文研究了当前复杂系统控制的主流技术,即基于SEC的开放式控制平台,并着重探讨了OCP技术及其在UUV制导系统中的应用及关键技术。UUV制导系统本身具有信息复杂性、不完整性和多目标决策等特点,决定了其导引和控制的难度。由于现场总线、网络控制理论的应用和目前UUV武器的开发各自为战的现状,使得UUV武器系统具有多硬件平台和多软件平台,已经构成一个典型的异构性网络。对这类复杂的异构网络系统如果没有一个规范和统一的通信协议,必将使得系统控制具有很高的技术难度,也会阻碍进一步的发展。而美国DARPA倡导的SEC技术是实现这一要求的有效技术之一,目前包括美国波音公司等在内的公司正在将此技术大量应用在UUV的控制系统中。
开放式控制平台不是一个孤立的技术,它涉及嵌入式操作系统、实时现场总线、快速控制原型、硬件在回路仿真、网络控制系统等多个方面,而这些都是目前计算机和控制中的最新技术和理论。在UUV制导系统中引入SEC和OCP这些新的理论和技术,为UUV制导系统中许多目前存在的问题提供解决问题的新途径。
开放式控制平台 软件使能控制 嵌入式操作系统 无人潜航器 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)