——由于液力耦合器的最大转速比in=0.97~0.98,因此液力耦合器的输出最大转速要比输入转速低;
——调节延迟时间较长,不适应紧急事故的处理,适合于较高转速的泵与风机调速的场合;
——调速精度不高,不适宜要求精确转速的场合使用;
——因为无直联机构,故液力耦合器一旦发生故障,泵与风机也只能停止工作;
——调速效率低(η=i),等于转速比,产生的损耗大,在各种变速装置中属低效调速装置。
3.2 液力调速离合器
液力调速离合器是一种以油为工作介质,依靠摩擦力传递功率的变速传动装置。它是一种新型的液力无级调速传动装置,既能实现无级调速,又能象普通离合器一样,既可将主动部分与从动部分分离,又可将主动部分与从动部分无相对运动地合在一起,所以称其为液力调速离合器,也称奥米伽离合器。
其调速特性与液力耦合器基本相似,也属于低效调速装置,但其最大调速比in=1,调速效率η=P2/P1=M2ω2/M1ω1=n2/n1=i,当泵与风机相联、i=2/3时,ΔPmax=0.148PN,体积比液力耦合器较小,投资差不多,但功率较小。
3.3 电磁转差离合器
电磁转差离合器的功用和液力耦合器及液力调速离合器相同,都是安装在定速电动机与泵或风机之间的一种变速传动装置,使泵与风机可以实现无级调速。
电磁转差离合器的基本部件为电枢与磁极,这两者之间没有机械联系,各自可以自由旋转。电枢是主动部分,直接与电动机的输出轴连接,并由电动机带动其旋转。电枢通常为圆筒形整块铸钢,在外表面常铸或焊有风扇叶,以提高散热效果。磁极为从动部分,它通过联轴器与泵或风机的输入轴相连。磁极由铁芯和励磁绕组组成,励磁绕组有装设在转子上的,也有固定在机壳上的,前者的励磁电流需通过集电环和电刷引到转子。图5所示为电磁转差离合器的示意图。从图5可见,主动部分(电枢)与从动部分(磁极)之间在机械上是分开的,当中有气隙。当励磁绕组无励磁电 流 通 过 时 , 则 这 两 部 分 互 不 相 干 ; 只 有 在 通 以 励 磁 电 流 时 , 才 能 靠 电 磁 效 应 相 互 联 系 起 来 。
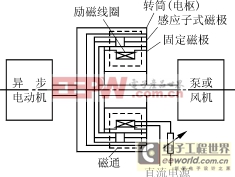
图5 电磁转差离合器示意图
电磁转差离合器的调速原理是基于电磁感应定律。当励磁绕组通以直流电时,沿气隙圆周面将形成若干对极性交替的磁极,其磁通穿过气隙与电枢相链。当电动机带动电枢旋转时,电枢与磁极之间有相对运动,因感应而产生电势,这一感应电势将在电枢中形成涡流,其方向可由右手定则确定。此涡流又与磁场的磁通相互作用,产生电磁力,其方向可按左手定则确定,这个力作用于电枢一个转矩,其方向与电枢的旋转方向相反,是与带动电枢旋转的拖动转矩相平衡的制动力矩。这个力及力矩也同样作用在磁极上,其方向与电枢旋转方向相同,它使磁极沿电枢旋转方向旋转,并拖动泵或风机旋转。
电磁转差离合器与硬性联接的普通联轴器传动的不同之处是:电磁转差离合器的磁极转速n2是可以连续调整的,且n2一定小于电枢转速n1。这是因为若n2=n1,则磁极与电枢之间不存在相对运动,即电枢没有切割磁力线,也就不可能在电枢中感应出电势,更谈不上产生力和转矩了。因此,电磁转差离合器的磁极与电枢之间必存 在一个转速差Δn=n1-n2,这和异步电动机的原理相似。
磁极转速n2的高低由磁极磁场的强弱而定,亦即由励磁电流的大小而定。当励磁电流大时,n2就高,磁极与电枢之间只要有较小的转差率,就能产生足够大的涡流转矩来带动负载;当励磁电流小时,n2就低,必须有大的转差率才能产生带动负载的涡流转矩。所以,改变励磁电流的大小就可达到泵或风机调速的目的。
根据电磁转差离合器的上述工作原理,所以它又被称作涡流联轴器、涡流式电磁转差离合器等。
电磁转差离合器也是一种有转差损耗的低效调速装置,调速效率等于调速比,即:η=n2/n1=i,in=0.83~0.87,当与泵或风机联接调速时,最大调速损耗为:
ΔPmax=0.148P2max/in3=0.148P1max/in2≈(0.23~0.26)P2max
调速的经济性比液力耦合器及液力调速离合器更差。
其优点是:
——可靠性高,只要把绝缘处理好,就能实现长期无检修工作;
——占地面积小,控制功率小,一般仅为电动机额定功率的1%~2%;
——结构简单,加工容易,价格低廉。
其缺点是:
——存在转差损耗,尤其是当in较低时,运行经济性较差;
——容量较大时,需采用空冷或水冷,结构较复杂;
——调速响应时间长;
——噪声较大。
适用于转速不很高、调速范围不很宽的中小容量泵与风机的调速传动。
表4 液力耦合器、液力调速离合器、电磁调速离合器的工作特
|