采用OSEK/VDX的电动助力系统设计
详细分析电动助力转向系统(EPS)的原理及其工作流程,采用PIC18F458单片机作为控制器,通过其增强型的PWM脉宽调制模块ECCP控制助力电机,实现EPS系统的助力控制、回正控制、阻尼控制等方式。应用软件采用OSEK OS嵌入式操作系统为平台,将EPS系统进行多任务划分,通过优先级调度达到系统协调运行的目的。
关键词 单片机 电动助力控制 PWM OSEK/VDX PIC18F458 PICOS18
随着电子技术和电机控制技术的发展,电动助力转向(Electronic Power Steering,EPS)系统的研究取得了很大进步。目前,汽车电动助力转向已部分取代传统液压动力转向(Hydraulic Power Steering,HPS)。经过20多年的发展,EPS技术日趋完善,已经取得了相当大的成果,在轻型轿车、厢式车上得到了广泛应用[1]。
传统的软件设计不容易维护,移植性差,且实时性得不到保证。随着汽车工业的不断发展,电子技术在汽车上得到越来越多的应用。为了满足日益复杂的汽车电子控制软件的开发需要,实现应用软件的可移植性和不同厂商的控制模块间的可兼容性,1993年德国汽车工业界联合推出了“汽车电子的开放式系统及接口软件规范”,即OSEK(open systems and the corresponding interfaces for automotive electronics)规范,旨在为汽车上的分布控制单元提供一个开放结构的工业标准。1994年法国汽车工业界使用的汽车分布式运行系统VDX(Vehicle Distributed Executive)和OSEK规范合并,形成OSEK/VDX规范[2]。目前该规范已经成为ISO国际标准(ISO17356)。基于此,本文提出了基于嵌入式实时操作系统的EPS软件设计方法。
1 EPS系统的结构和工作原理
1.1 EPS系统的结构
根据电机安装位置的不同,EPS可分为转向轴助力式、小齿轮助力式和齿条助力式。图1是一个典型电动助力转向系统的示意图。EPS控制系统的主要组成部件[3]:
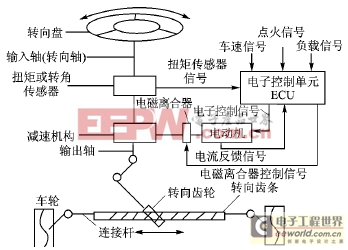
图1 电动助力转向系统示意图
① 扭矩信号传感器,测量驾驶员作用在转向盘上的力矩大小和方向。
② 车速信号传感器,测量汽车的行驶速度,在不同的车速和方向盘转矩的情况下,会提供不同的助力,以保证EPS系统在低速下灵活,高速下具有较好的“路感”。
③ 助力电动机,是EPS系统最关键的部件之一,助力电动机要求低转速大扭距、转动惯量小、可靠性高、振动小、噪声小,且尺寸小、质量轻。
④ 电磁离合器,主要起安全保护的作用,当EPS发生故障时,电磁离合器会及时切断电动机和转向柱的连接,汽车以传统的机械转向装置进行工作,从而保证行车安全。
⑤ 减速机构,是EPS系统不可缺少的部分,用来产生减速增扭的作用。
⑥ 电子控制单元ECU,主要包括信息处理单元及其外围电路。它是EPS系统的控制核心。控制单元根据方向盘转矩传感器和车速传感器的信号,经过A/D转换和逻辑分析与计算后,发出指令控制电机工作。
1.2 EPS系统的工作原理
虽然EPS的有3种类型,但工作原理是一样的:通过扭矩传感器和车速传感器,进行信号采集,经A/D转换,将信号发送到电子控制单元(ECU)中,单片机根据采集到的车速信号与扭矩信号,并根据相应的控制策略对直流伺服电动机进行实时控制。
根据汽车转向行驶的不同情况要求,EPS按不同的控制方式进行控制,通常有3种基本控制方式。
(1) 助力控制
汽车在低速范围内行驶,方向盘进行转向并离开中间位置时电控单元对电动机进行常规控制;通过计算确定助力电动机的电流,以获得合适的助力转矩,使转向操纵轻便灵敏。
(2) 回正控制
回正控制可以改善汽车的回正性能。汽车在低速范围内行驶转向后方向盘回到中间位置附近时,电控单元使电动机电流迅速减小,以便转向轮迅速回正;在高速时,采用阻尼控制,使电机两端短路,产生与回正力矩相反的回正阻尼,改善转向盘的回正超调。
(3) 阻尼控制
阻尼控制可以衰减汽车高速行驶时出现的方向盘抖动现象,消除转向轮因路面输入而引起的摆振。其原理很简单,即汽车处于高速行驶时,使电动机短路,其端电压变为零,电动机将不提供助力,但由于感应电动势的作用,电动机将产生与其转动方向相反的转矩。此过程等于增加了转向系统的阻尼,驾驶员能够获得适当的路感,不致有发飘的感觉。
2 EPS控制系统ECU设计
EPS系统实现的主要功能是采集扭矩传感器信号、车速传感器信号和电动机反馈电流信号,经控制器中的控制策略和控制算法,通过脉宽调制控制伺服电动机为驾驶员提供转向辅助力。另外,考虑到其应用对象的特殊性,其安全性要求的绝对地位,系统还需要提供许多应急处理方案。
EPS系统的硬件设计主要包括以下一些主要模块:控
模拟电源 电源管理 模拟器件 模拟电子 模拟 模拟电路 模拟芯片 德州仪器 放大器 ADI 相关文章:
- 采用数字电源还是模拟电源?(01-17)
- 模拟电源管理与数字电源管理(02-05)
- 数字电源正在超越模拟电源(03-19)
- 数字电源PK模拟电源(04-03)
- TI工程师现身说法:采用数字电源还是模拟电源?(10-10)
- 开关电源与模拟电源的分别(05-08)