基于LabVIEW的桥梁运行状态长期
,开始下组的数采。这种前后组的振幅启动控制对货车比
较适合,因为货车的振动幅值较大;但由于车头和客车的振动幅值较小,采用振幅启动方法
只能降低振幅启动阈值,这样势必引起下组数据数采的提前TCP连接和采集,导致入库数
据量增加,所以针对这种情况,增加了另一种数采控制方法,即速度启动:根据桥头测速站
测到的列车速度和每组距桥头的距离推算列车到达每组的时间,当启动下组时间到或本组振
幅大于启动下组的启动阈值时都可启动下一组的TCP连接,继而开始下一组的数采。
由于大桥长达3公里以上,所以列车在桥上行驶时存在加速和减速情况,仅用列车经过桥头
时的速度推算列车到各测站的时间是不够准确的,故在桥中增加了一个测速站,列车到达桥
中时启动第五组的TCP连接和数采,由桥中列车速度和各测站与桥中的距离推算列车到达后
面几组测站(6-9组)的时间和每组指定通道的振幅来启动下面一组的TCP连接和数采工作。
采集结束控制:在每组的数据采集过程中,监视指定通道(即指定孔)的振幅,若振幅小于本
组的关闭阈值则延时若干时间后,关闭本组的数据采集;为加强采集控制的可靠性(由于传
感器失灵可能导致列车通过该测点后振动幅度仍可能不减小、上下行会车等原因造成的振幅
不减小情况,如果仅靠振幅控制结束采集势必造成采集时间过长,无用数据过多,增加数据存
储的压力),针对测速站测得的每趟车的轴数不同(货车100根轴以上,一般情况下车头和客
车的轴数少于100),每组采集时间分为两挡:货车3分钟,车头和客车1.5分钟,从启
动本组数采开始计时,采集时间到也可关闭本组数据采集,断开本组TCP连接。和每组的
启动条件类似,振幅关闭和时间关闭采用或逻辑,哪个条件先到达则那个条件起关闭本组数
采的作用。
正常情况下,随着列车依次到达各测站,各站的TCP连接和采集工作依次启动,并随着列车
的通过而依次关闭数采和TCP连接,系统重新开始下一趟列车的监测过程。
由于本远程监测系统分布范围较大,监测点多,所用网络组件较多,任何部分出现故障都可
能造成数采流程的不能正常结束,为此,在系统中增加了系统总清控制,即在桥头测速站测
到列车到达后,启动系统总定时,当定时时间到达10分钟后,监控程序发出总清命令,结束
各测站的数据采集,断开所有测站的TCP连接,系统重新进入初始监测状态(一般来讲,列车
过桥
时间不会超过10分钟)。系统基本工作流程图见图3。
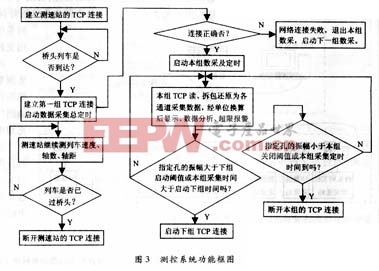
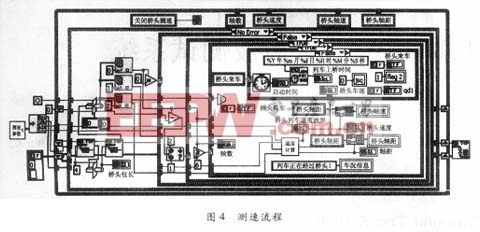
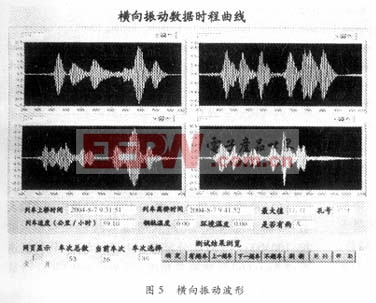
图4为测速流程的框图程序,图5是从数据查询系统调出的某次列车经过时,部分桥梁横向振
动波形。
由于在网络传感器中的Rabbit 3000使用了看门狗技术,远程测控软件也采用了软件滤波等
多项抗干扰技术及自复位措施,使得系统运行具有很强的健壮性和可靠性。?
3结束语
本系统现已经在黄河大桥上运行将近半年,该系统的成功运行为桥工处的桥梁状态
实时远程监测、桥梁维护、故障预警、桥梁运行数据查询等管理工作提供了科学依据,
库存数据为桥梁学家研究桥梁振动理论提供了丰富的数据。本系统可应用于各种大型铁路桥
梁、公路桥梁、水库大坝等的运行状态和健康状态的远程监测。
- 基于网络的电能质量监测系统设计(01-14)
- 采用LabVIEW的近红外测量方案 (01-18)
- 电能质量检测与监测分析终端设计汇总(01-28)
- 核磁共振系统中射频开关设计(01-04)
- 基于LabVIEW的卫星干扰监测技术研究(06-28)
- 基于虚拟仪器的电网综合参数测控系统(06-21)