Matlab和VC++混合编程实现障碍检测系统
文中主要研究移动机器人在环境未知情况下的障碍物检测问题,提出了一种基于Matlab和VC++混合编程的障碍物检测系统软件实现方法。该方法整合了MATLAB的数值计算功能,具有强大的图形、图像处理功能和VC++的可视化、执行速度快、易维护升级等特点。实验结果表明,这种检测方法在障碍物检测系统的开发过程中可以大大提高编程效率,并缩短软件的开发周期。
引言
目前,许多研究工作者已将视觉导航应用到移动机器人的移动控制中,但由于其图像处理数据量大、算法较复杂,因此在具体应用中存在实时性较差、道路区域检测的算法不够鲁棒、只能适合算法特定的道路模型等缺点。为了提高移动机器人检测障碍物的实时性,文中提出了一种基于Matlab和VC混合编程的障碍物检测系统软件实现方法,可以大大提高编程的效率,缩短软件的开发周期,且可以快速准确地检测到障碍物。
1 VC++与Matlab混合编程方法
Matlab是由美国MatlaWorks公司推出的用于算法开发、数据分析以及数值计算的高级技术计算语言和交互式环境,在矩阵运算、数值计算和图形显示等方面,具有强大的功能,非常直观、简洁。它为各工程计算领域提供了相应的工具箱,在控制界、生物医学工程、语音处理、数字信号处理、雷达工程、信号分析、计算机技术等各行各业中都得到了广泛的应用。但是和其它高级编程语言相比,它的程序执行速度较慢,其源代码的公开不利于算法和数据的保密。
VisualC++是Microsoft公司推出的面向对象可视化编程的高级程序设计语言,它集成了功能强大的编译器、连接器、调试器、AppWizard等多种多样的可视化编程工具。它采用编译方式运行,运行速度快,特别是编写界面的能力很强。但它在数字处理分析、算法工具、编程效率和准确方便的绘制数据图像方面远低于Matlab语言。
Matlab与VC++常用的结合方法有5种:
①Matlab引擎。
②用Matcom将Matlab的M文件编译成C语言文件并嵌入VC++。
③使用Matlab提供的函数库或C++接口函数库直接在VC中编程。
④利用Matlab提供的MCC命令生成与Matlab文件对应的基于C语言或C++语言的包裹文件,再嵌入VC中。
⑤应用组建技术实现Matlab与VC混合编程。
本研究针对5种方法进行了研究和试验。后4种方法对于Matlab的图像处理工具箱只有部分支持,而Matlab引擎对Matlab具有全功能调用功能,包括对于数字图像和通信对象处理的支持,故本文选用Matlab引擎来实现基于VC++和Matlab的障碍物检测系统研发平台。
2 障碍物检测系统的设计与实现
2.1 Matlab和VC接口编译环境的设置
在VC的集成环境中,如要实现与Matlab引擎之间的通信,需要对VC的编译环境进行一些设置,例如:为VC工程添加Matlab头文件、添加Matlab库文件等等。
2.2 VC中调用Matlab引擎的设置及程序实现
在VC中利用Matlab引擎进行图像处理,首先需要在程序中进行一些基本定义,如在使用Matlab引擎类的cpp文件中首先添加语句#inclu-de“engine.h”以及#include“matrix.h”,需要用Engine*m_ep定义Matlab引擎,用m_ep=engOpen(NULL)语句启动Matlab引擎;最后还要用engClose(m_ep)语句关闭Matlab引擎等。
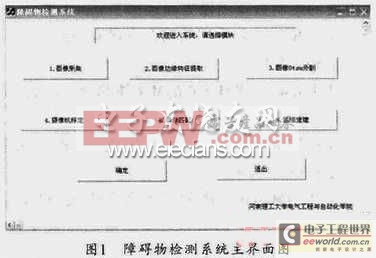
本文研究的障碍物检测系统主要是先利用双目立体视觉来检测障碍物的位置及距离等信息,并对移动机器人的双摄像机进行控制来采集图像对,然后对图像进行一系列的处理。其软件设计采用模块化开发思想,主要包括图像采集模块、边缘特征提取模块、Otsu图像分割模块、摄像机标定模块、立体匹配模块和三维重建模块。障碍物检测系统主界面如图1所示。
图像Otsu分割Matlab图像处理部分源程序为:


3 障碍物检测系统检测过程及结果

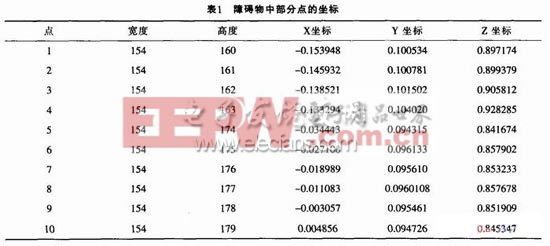
图2~5为障碍物检测系统的处理过程,即从获取实时图像、图像预处理、障碍物特征提取、特征点匹配等过程,最后通过视差法计算出障碍物的位置坐标,从而为决策控制提供必要的信息。表1为检测到的障碍物中的部分点坐标。
4 结束语
在实际的科研中,省去了编写一些复杂烦琐的图像算法代码,可以为熟悉VC语言的工程技术开发实用图像处理算法研究提供方便;利用Matlab引擎可以简单有效的实现在VC中调用Matlab的功能,因此提高了效率,缩短了软件开发周期。
- 基于Matlab的无失真模拟滤波器设计(04-19)
- 基于Matlab的IIR数字滤波器设计方法比较及应用(07-15)
- 基于Matlab的雷达系统仿真软件包设计与实现(09-16)
- 基于Matlab的FIR数字滤波器设计(10-07)
- 基于Matlab的孤立逆变电源设计方案(09-17)
- 13款逆变电源的设计技术及具体应用案例(07-07)