基于AD2S83的角位置检测系统及其在雷达伺服系统
时间:12-28
来源:互联网
点击:

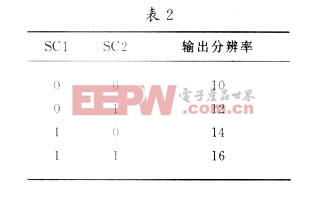
AD2S83的输出分辨率可以通过SC1,SC2两个管脚的逻辑状态被用户设置为10,12,14,16位,具体见表2。
雷达伺服系统必须满足一定的精度要求,同时要确保其具有高的可靠性,而在某些雷达中还要求其体积小、重量轻。基于无刷旋转变压器与AD2S83集成电路的优点,选用高可靠性的无刷旋转变压器与AD2S83 RDC构成这些雷达的角位置检测系统,并以AD2S83的模拟速度输出信号来作为速度反馈信号构成雷达伺服系统的速度回路是设计这些雷达伺服系统时较好的选择。系统框图见图2。
根据系统的性能指标,按照上述计算方法选定AD2S83的外围元件后,即可设计出速度反馈与位置检测电路。在具体实现该电路时应注意+Vs,-Vs与ANALOG GROUND之间,+VL与DIGITAL GROUND之间要分别并联100μF(陶瓷)和10μF(胆)的去耦电容,它们应尽量靠近AD2S83变换器放置,而且每个变换器都应有自己单独的去耦电容。旋变的两个信号地应连到变换器的SIGNAL GROUND管脚,以减少正、余弦信号间的耦合,另外,旋变的正、余弦信号以及参考信号最好分别使用双绞屏蔽线。
下面介绍计算机对AD2S83 RDC的操作,在此之前先对AD2S83变换器的控制信号加以简单的说明:
/INHIBIT输入:/INHIBIT信号只禁止可逆计数器向输出锁存器传送数据,并不打断跟踪环的工作,释放该信号将自动产生一个BUSY,并刷新输出锁存器。
/ENABLE输入:/ENABLE信号决定了输出数据的状态,高电平时,输出数据管脚保持在高阻状态。低电平时,允许输出锁存器中的数据传送到输出管脚上。对/ENABLE的操作不会影响变换器的工作。
BYTESELECT输入:无论该信号的状态如何当/ENABLE为低电平时,低位字节就将出现在数据输出线DB9-DB16上。当BYTESELECT为高电平时,高8位字节将出现在数据输出线DB1-DB8上;当BYTESELECT为低电平时,低8位字节将出现在数据输出线DB1-DB8上,它们同时也出现在DB9-DB16上。
计算机对AD2S83读取数据的过程:首先对AD2S83施加/INHIBIT信号,阻止锁存器的刷新,当/INHIBIT被置为低电平并延迟600ns后数据有效,把/ENABLE信号置为低电平后,即可读取数据。读完数据后,应立即释放/INHIBIT信号,把它置为高电平,以使输出锁存器能被刷新。
6 结束语
本文介绍了AD2S83 RDC集成电路的应用,并设计了由该集成电路和旋转变压器构成的雷达伺服系统中速度反馈与角位置检测系统。经实践表明,该系统具有体积小、可靠性高、抗干扰能力强、操作灵活方便等优点。
参考文献
- 精密旋变数字转换器测量角位置和速度(03-17)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)